Guide för att använda PIC16F877A för stegmotorprojekt
PIC16F877A -mikrokontrollern används ofta i många elektroniska projekt eftersom det erbjuder en bra balans mellan funktioner och användarvänlighet.I den här guiden kommer vi att titta närmare på PIC16F877A och täcker allt från dess pinout- och CAD -modeller till dess användning i att kontrollera stegmotorer.Oavsett om du bygger en enkel enhet eller ett komplext automatiseringsprojekt, kommer att förstå hur du ansluter och styrmotorer med hjälp av denna mikrokontroller att hjälpa dig att få bästa resultat.
Katalog

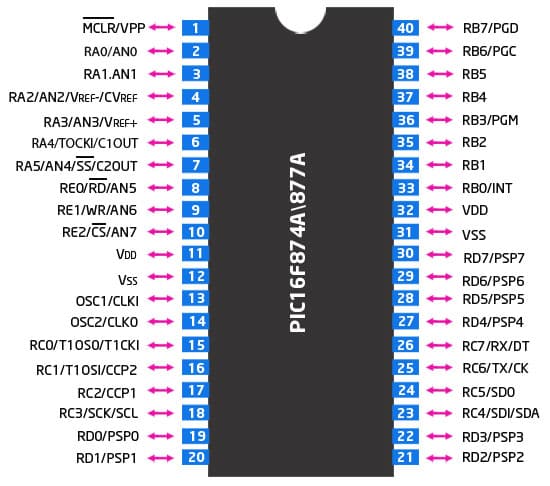
PIC16F877A PIN -konfiguration
CAD -modeller för PIC16F877A
Pic16f877a diagramsymbol
PIC16F877A PCB FOOTPRINT

3D -modell
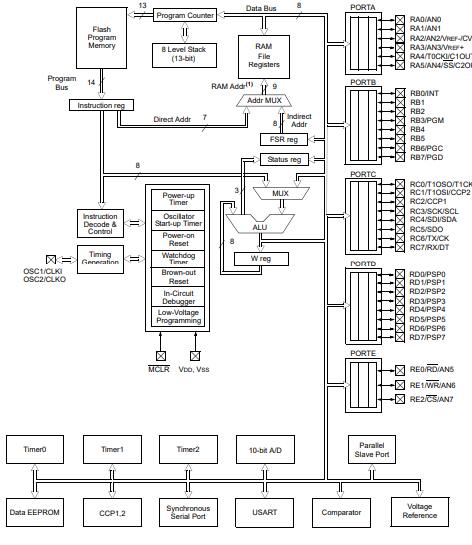
Pic16f877a intern struktur
Detaljerade tekniska specifikationer
| Typ | Parameter |
| Fabriksledning | 7 veckor |
| Montera | Genom hålet |
| Monteringstyp | Genom hålet |
| Förpackning / fodral | 40-dip (0,600, 15,24mm) |
| Antal stift | 40 |
| Datakonverterare | A/D 8x10b |
| Antal I/OS | 33 |
| Vakthundtider | Ja |
| Driftstemperatur | -40°C ~ 85°C ta |
| Förpackning | Rör |
| Serie | BILD® 16f |
| Publicerad | 1997 |
| JESD-609 kod | e3 |
| Pbfree -kod | Ja |
| Delstatus | Aktiv |
| Fuktkänslighetsnivå (MSL) | 1 (obegränsad) |
| Antal avslutningar | 40 |
| ECCN -kod | Örat99 |
| Terminal | Matt tenn (sn) - glödgad |
| Tilläggsfunktion | Arbetar med 4V minimiförsörjning |
| Terminalposition | DUBBEL |
| Leveransspänning | 5V |
| Frekvens | 20MHz |
| Basdelnummer | Pic16f877a |
| Räkning | 40 |
| Tillförselspänning-max (VSUP) | 5.5V |
| Strömförsörjning | 5V |
| Tillförselspänning-min (VSUP) | 4.5V |
| Gränssnitt | I2C, SPI, SSP, UART, USART |
| Minnesstorlek | 14 kb |
| Oscillator | Extern |
| Nominell leverantör | 1,6 mA |
| Ramstorlek | 368 x 8 |
| Spänning - leverans (VCC/VDD) | 4V ~ 5.5V |
| UPS/UCS/perifer ICS -typ | Mikrokontroller, RISC |
| Grundprocessor | BILD |
| Kringutrustning | Brown-Out Detect/RESET, POR, PWM, WDT |
| Programminnetyp | FLASH |
| Kärnstorlek | 8-bitars |
| Programminnesstorlek | 14KB (8K x 14) |
| Anslutning | I2c, spi, uart/uart |
| Bitstorlek | 8 |
| Åtkomsttid | 20 µ.s |
| Har ADC | Ja |
| DMA -kanaler | Inga |
| Databussbredd | 8b |
| Antal timers/räknare | 3 |
| Adressbussbredd | 8b |
| Densitet | 112 kb |
| EEPROM -storlek | 256 x 8 |
| CPU -familj | BILD |
| Antal ADC -kanaler | 8 |
| Antal PWM -kanaler | 2 |
| Antal i2C -kanaler | 1 |
| Höjd | 4,06 mm |
| Längd | 52.45mm |
| Bredd | 14,22 mm |
| Nå SVHC | Ingen SVHC |
| Strålning härdning | Inga |
| ROHS -status | ROHS3 -kompatibel |
| Blyfri | Blyfri |
Förstå stegmotorer
En stegmotor är en typ av elmotor som rör sig i specifika steg snarare än i kontinuerlig rörelse som traditionella motorer.Dessa steg-för-steg-rörelser mäts i grader, som kan variera beroende på applikationen.
Stegmotorer kan fungera i olika lägen: vågdrivning, full enhet och halv enhet.Varje läge styr hur motorfaserna är energiska, påverkar dess prestanda och gör den lämplig för olika användningsområden.
I vågdrivläge drivs endast en fas av motorn i taget.Detta enkla kontrollläge är användbart för situationer där effekteffektivitet prioriteras framför vridmoment, till exempel i grundläggande automatiseringsuppgifter där minimal startström behövs.
Full Drive Mode Powers Två faser samtidigt.Detta resulterar i högre vridmomentutgång när två spolar fungerar tillsammans, vilket gör det idealiskt för applikationer där precision och styrka behövs, till exempel i robotik och CNC -maskiner.
Half Drive Mode kombinerar funktionerna i både våg och full drivning genom att växelvis aktivera en fas och två faser.Detta tillvägagångssätt ger mindre stegstorlekar, vilket effektivt fördubblar motorns upplösning.Half Drive är bäst lämpad för applikationer som 3D -utskrift och fin instrumentering, där smidig rörelse och exakt positionering är viktiga.
När du väljer en stegmotor för en specifik användning bör du överväga driftsmiljön.För uppgifter med hög precision rekommenderas halvdrivläge för att säkerställa smidiga övergångar och minskade vibrationer.För projekt som är inriktade på energibesparingar kan vågdrivläge vara mer lämpligt.
Att välja rätt läge kräver balanseringsfaktorer som vridmoment, hastighet och systemkomplexitet.Att välja rätt läge kan påverka motorns prestanda betydligt och den totala effektiviteten i ditt system.
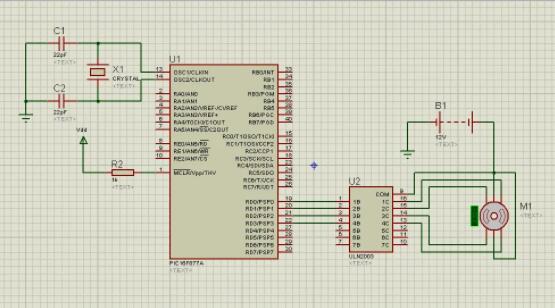
Ansluter en stegmotor med PIC16F877A
För att ansluta en stegmotor med en Pic16f877a Microcontroller, du kan använda ULN2003 Transistor Array.Denna integrerade krets, designad för motoriska motorer, innehåller sju Darlington-par.Mikrokontrollerns nedre Portd -bitar är kopplade till ingångsstiften (1B, 2B, 3B, 4B) av ULN2003, medan dess utgångsstift (1C, 2C, 3C, 4C) ansluter till stegmotorns stift.Motorns vanliga stift och ULN2003: s COM -stift är anslutna till en 12V strömförsörjning.
Stegmotorer används ofta för applikationer som kräver exakt rörelsekontroll.De omvandlar digitala pulser till mekanisk rotation, vilket gör dem idealiska för enheter som CNC -maskiner och 3D -skrivare, där position och hastighet måste regleras noggrant.
ULN2003 spelar en nyckelroll för att kontrollera stegmotorer på grund av dess förmåga att hantera hög ström och dess enkla gränssnitt med mikrokontroller.När de är anslutna till PIC16F877A används de nedre Portd -bitarna för att styra stegmotorn.Denna konfiguration ger exakt stegkontroll, vilket säkerställer exakt rörelse och positionering.
Att använda ULN2003 i motorstyrningsuppsättningar är mycket tillförlitlig i verkliga applikationer.Det hjälper till att minimera problem som missade steg eller felaktig positionering, förbättra den totala prestandan.Regelbundet underhåll och kalibrering baserat på användningsdata kan ytterligare optimera motorisk funktion, vilket säkerställer långvarig stabilitet och exakt drift.
Justera stegmotorns hastighet
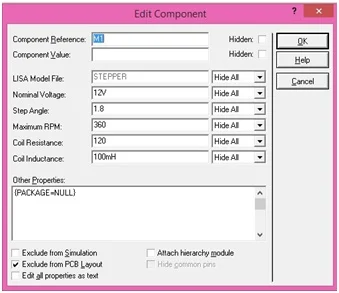
Stegmotorhastighet kan modifieras exakt med hjälp av Proteus Simulation -programvara.Genom att komma åt motorns inställningar genom 'Redigera egenskaper' kan justeringar av parametrar som antalet steg och stegvinkel göras.Till exempel delar en 200-stegs motor en full rotation (360 °) i 200 steg, vilket gör varje steg 1,8 °.Att ändra dessa inställningar i Proteus kommer dynamiskt att reflektera under simuleringen.
I praktiken används stegmotorer ofta i branscher där exakt kontroll av rörelse är avgörande, till exempel i CNC -maskiner och robotik.Justera stegvinkeln och antalet steg finjusterar motorn för att uppnå den exakta rörelsen som krävs för specifika uppgifter.
Ändring av stegmotorparametrar påverkar prestandaegenskaper såsom vridmoment och upplösning.Till exempel förbättrar antalet steg i allmänhet upplösningen men kan påverka vridmomentet och responstiden.Att förstå dessa avvägningar genom simulering hjälper till att fatta välgrundade beslut.
Ett nyanserat perspektiv avslöjar att iterativa justeringar, följt av praktiska försök, leder till en mer robust motordesign.Att säkerställa att digitala simuleringar nära speglar verkliga resultat är avgörande.Nyanserna med att konfigurera en stegmotor ligger verkligen i att slå en balans mellan teoretisk precision och praktisk genomförbarhet.
Programmering av en stegmotor med PIC16F877A
Det här avsnittet täcker hur man programmerar en stegmotor med PIC16F877A -mikrokontrollern, förklarar olika körlägen och ger praktisk vägledning för effektiv implementering.
Här är en grundläggande exempelkod för att demonstrera stegmotorkontroll med hela drivläget:
void main ()
{
TRISD = 0B00000000;// Ställ in Portd som utgång
Portd = 0B11111111;// Initialisera Portd
do
{
Portd = 0B00000011;// aktivera två faser samtidigt
Fördröjning_ms (500);// 0,5 sekunders fördröjning
Portd = 0B00000110;
Fördröjning_ms (500);
Portd = 0B00001100;
Fördröjning_ms (500);
Portd = 0B00001001;
Fördröjning_ms (500);
} medan (1);// slinga på obestämd tid
}
I den här koden konfigureras PIC16F877A: s Portd som en utgångsport för att styra stegmotorn genom ULN2003 -drivrutinen.Sekvensen av kommandon aktiverar två faser av stegmotorn åt gången, vilket är karakteristiskt för fullt drivläge.Detta läge håller rotorn i ett fast läge med maximalt vridmoment men förbrukar vanligtvis mer kraft.
Full Drive -läge är inte det enda sättet att styra stegmotorer.Wave Drive och Half Drive -lägen ger alternativ baserade på specifika krav.Wave Drive aktiverar bara en fas åt gången, vilket minskar strömförbrukningen men resulterar i lägre vridmoment.Half Drive växlar mellan en och två faser, och erbjuder högre upplösning och jämnare rörelse.
När du programmerar stegmotorer väljer du körläget som bäst passar dina behov, oavsett om det är för exakt positionering, effekteffektivitet eller maximalt vridmoment.
Praktiska tillämpningar av stegmotorer
Stegmotorer används ofta i många branscher på grund av deras förmåga att tillhandahålla exakt kontroll och tillförlitlig prestanda.Deras mångsidighet gör dem lämpliga för allt från bilar och hushållsapparater till industrimaskiner och medicintekniska produkter.
I fordonsvärlden spelar stegmotorer en nyckelroll för att kontrollera system som gasspjället, strålkastare och luftkonditionering.De hjälper till att finjustera dessa komponenter och se till att fordon går smidigt och effektivt.Under tiden, i kontorsutrustning som skrivare och fotokopiatorer, hanterar stegmotorer uppgifter som pappersmatning och bläckplacering.Denna precision säkerställer konsekvent utskriftskvalitet och smidig drift över tid.
Hemma förlitar sig apparater som tvättmaskiner och diskmaskiner på stegmotorer för att kontrollera vattenflödet och trumrotation, vilket säkerställer att allt fungerar sömlöst.I industriella miljöer är stegmotorer avgörande för att använda CNC-maskiner och robotarmar, där de tillhandahåller de exakta rörelserna som behövs för högprecisionstillverkning.
Säkerhetssystem drar också nytta av den pålitliga rörelsen hos stegmotorer.I enheter som övervakningskameror och automatiserade lås tillåter stegmotorer smidig och korrekt positionering, vilket är viktigt för effektiv övervakning och säkerhet.Inom sjukvården används stegmotorer på medicintekniska produkter som infusionspumpar och avbildningsutrustning, där de erbjuder den exakta kontrollen som krävs för säker och korrekt drift.
När tekniken fortsätter att utvecklas förväntas stegmotorer hitta ännu fler applikationer inom tillväxtområden som robotik och autonoma fordon.Deras fortsatta utveckling kommer sannolikt att leda till ännu större precision och effektivitet och utvidga sin roll i olika branscher.
Jämförbara mikrokontrolldelar
| Artikelnummer | PIC16F877A-I/P | Pic16f77-i/p | Pic16f74-i/p | Pic16f777-i/p |
| Tillverkare | Mikrochip -teknik | Mikrochip -teknik | Mikrochip -teknik | Mikrochip -teknik |
| Förpackning / fodral | 40-dip (0,600, 15,24mm) | 40-dip (0,600, 15,24mm) | 40-dip (0,600, 15,24mm) | 40-dip (0,600, 15,24mm) |
| Antal stift | 40 | 40 | 40 | 40 |
| Databussbredd | 8 b | 8 b | 8 b | 8 b |
| Antal I/O | 33 | 33 | 33 | 36 |
| Gränssnitt | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2c, spi, uart, uart |
| Minnesstorlek | 14 kb | 7 kb | 14 kb | 14 kb |
| Leveransspänning | 5 v | 5 v | 5 v | 5 v |
| Kringutrustning | Brown-Out Detect/RESET, POR, PWM, WDT | Brown-Out Detect/RESET, POR, PWM, WDT | Brown-Out Detect/RESET, POR, PWM, WDT | Brown-Out Detect/RESET, POR, PWM, WDT |
| Visa jämför | PIC16F877A-I/P MOT Pic16f77-i/p | PIC16F877A-I/P MOT Pic16f77-i/p | PIC16F877A-I/P MOT Pic16f74-i/p | PIC16F877A-I/P MOT Pic16f777-i/p |
Vanliga frågor [FAQ]
1. Vad använder en stegmotor för att generera mekanisk rörelse?
En stegmotor genererar mekanisk rörelse med elektriska pulser.
2. Vad gör en stegmotor?
En stegmotor rör sig i diskreta steg.
3. Hur mäts stegmotorer?
Stegmotorer mäts i grader.
4. Hur många steg tar en stegmotor?
En stegmotor rör sig ett steg i taget.
5. Hur många excitationslägen har en stegmotor?
En stegmotor har tre excitationslägen.
6. Vad är det enklaste sättet att ansluta en stegmotor?
Det enklaste sättet är att ansluta den till en PIC16F877A -mikrokontroller.
7. Hur många ingångsstift på ULN2003 är anslutna till de lägsta betydande bitarna i mikrokontrollerns Portd?
Fyra ingångsstift är anslutna till de lägsta betydande bitarna i mikrokontrollerns Portd
Om oss
ALLELCO LIMITED
Läs mer
Snabb förfrågan
Skicka en förfrågan, vi svarar omedelbart.
Varför välja Adesto RM25C64DS-LTAI-B Memory Chip för ditt projekt?
på 2024/10/10
PC817 OptoCoupler: Funktionalitet och moderna applikationer
på 2024/10/10
Populära inlägg
-
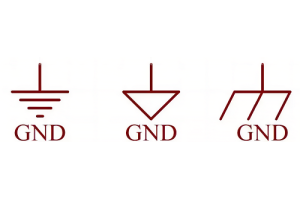
Vad är GND i kretsen?
på 1970/01/1 2838
-

RJ-45 Connector Guide: RJ-45 Connector Color Codes, Wiring Schemes, R-J45 Applications, RJ-45 Datablad
på 1970/01/1 2410
-

Fiberanslutningstyper: SC vs LC och LC vs MTP
på 1970/01/1 2023
-
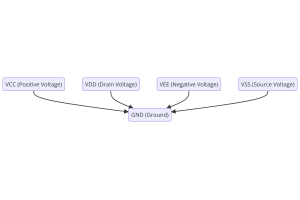
Förstå strömförsörjningsspänningar i elektronik VCC, VDD, VEE, VSS och GND
på 0400/11/5 1768
-

Jämförelse mellan DB9 och Rs232
på 1970/01/1 1730
-

Vad är ett LR44 -batteri?
Elektricitet, den allestädes närvarande kraften, genomsyrar tyst alla aspekter av vårt dagliga liv, från triviala prylar till livshotande medicinsk utrustning, det spelar en tyst roll.Men verkligen att ta tag i denna energi, särskilt hur man lagrar och effektivt matar ut den, är ingen enkel uppgift.Det är mot denna bakgrund som den här artikeln kommer att fokusera på en typ av myntcellbat...på 1970/01/1 1681
-
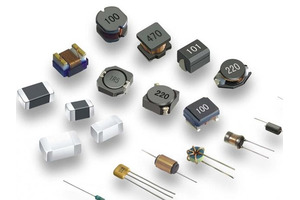
Förstå grunderna: induktansmotstånd och kapacitans
I den intrikata dansen för elektroteknik tar en trio av grundläggande element centrum: induktans, motstånd och kapacitans.Var och en bär unika drag som dikterar de dynamiska rytmerna i elektroniska kretsar.Här går vi in på en resa för att dechiffrera komplexiteten i dessa komponenter, för att avslöja deras distinkta roller och praktiska användningar inom den enorma elektriska orkest...på 1970/01/1 1628
-

CR2430 Batteri Comprehensive Guide: Specifikationer, applikationer och jämförelse med CR2032 -batterier
Vad är CR2430 -batteri?Fördelarna med CR2430 -batterierNormCR2430 BatterilapplikationerCR2430 -motsvarighetCR2430 vs CR2032Batteri CR2430 -storlekVad man ska leta efter när du köper CR2430 och motsvarandeDatablad pdfVanliga frågor Batterier är hjärtat i små elektroniska enheter.Bland de många tillgängliga typerna spelar myntceller en avgörande roll, som vanligtvis finns i kalkylatorer, ...på 1970/01/1 1497
-

CR2450 vs CR2032: Kan batteriet användas istället?
Litiummanganbatterier har vissa likheter med andra litiumbatterier.Hög energitäthet och lång livslängd är de egenskaper de har gemensamt.Denna typ av batteri har vunnit många konsumenters förtroende och fördel på grund av dess unika säkerhet.Dyra tekniska prylar?Små apparater i våra hem?Titta runt så ser du dem överallt.Bland dessa många litium-manganbatterier är CR2450-batterier o...på 1970/01/1 1471
-
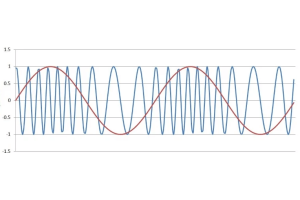
Vad är RF och varför använder vi det?
Radiofrekvens (RF) -teknologi är en viktig del av modern trådlös kommunikation, vilket möjliggör dataöverföring över långa avstånd utan fysiska anslutningar.Den här artikeln går in i grunderna i RF och förklarar hur elektromagnetisk strålning (EMR) gör RF -kommunikation möjlig.Vi kommer att utforska principerna för EMR, skapandet och kontrollen av RF-signaler och deras omfattande ...på 1970/01/1 1455
Hett artikelnummer
-
06031A8R0BAT2A
KYOCERA AVX
CAP CER 8PF 100V NP0 0603
23K256-I/ST
Microchip Technology
IC SRAM 256KBIT SPI 20MHZ 8TSSOP
MAX2039ETP+T
Analog Devices Inc./Maxim Integrated
IC MIXR 1.7-2.2GHZ UP/DWN 20TQFN
TPS61093DSKR
Texas Instruments
IC REG BOOST ADJ 900MA 10SON
UC3901DTR
Texas Instruments
IC ISOLATED FB GENERATOR 14SOIC
S2GOCURSENSETLI4971TOBO1
Infineon Technologies
SENSOR BOARD
OPA177FP
Texas Instruments
IC OPAMP GP 1 CIRCUIT 8DIP
CC2545RTCR
Texas Instruments
IC RF TXRX+MCU ISM>1GHZ 48VFQFN
CL05B103KP5NNNC
Samsung Electro-Mechanics
CAP CER 10000PF 10V X7R 0402
ADP2147ACBZ-170-R7
Analog Devices Inc.
IC REG BUCK PROG 800MA 6WLCSP
ATSAMG55J19B-MU
Microchip Technology
IC MCU 32BIT 512KB FLASH 64QFN
CDRH3D16NP-1R1NC
Sumida America Components Inc.
FIXED IND 1.1UH 1.9A 50 MOHM SMD
NCP1117DT25RKG
onsemi
IC REG LINEAR 2.5V 1A DPAK
XC4VLX60-10FF1148I
AMD
IC FPGA 640 I/O 1148FCBGA
VKM60-01P1
IXYS
MOSFET 4N-CH 100V 75A ECO-PAC2
MAX3085CSA+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER HALF 1/1 8SOIC
74F153SCX
onsemi
IC MULTIPLEXER 2 X 4:1 16SOIC
BA6859AFP-YE2
Rohm Semiconductor
IC MOTOR DRIVER 4.5V-5.5V 25HSOP -

BD46255G-TR
Rohm Semiconductor
IC SUPERVISOR 1 CHANNEL 5SSOP
0452005.NRL
Littelfuse Inc.
FUSE BRD MNT 5A 125VAC/VDC 2SMD
P4SMA150CA
Eaton - Electronics Division
TVS DIODE 128VWM 207VC SMA
PE42442A-Z
pSemi
IC RF SWITCH SP4T 6GHZ 24QFN
PIC18F26K42-I/SS
Microchip Technology
IC MCU 8BIT 64KB FLASH 28SSOP
SARA-U260-00S-02
u-blox
RF TXRX MODULE CELL 3G AT&T SMD
GRM1557U1H9R6DZ01D
Murata Electronics
CAP CER 9.6PF 50V U2J 0402
TMP114NBIYMTR
Texas Instruments
0.15-MM HEIGHT, 1.2-V CAPABLE TE
VI-26R-EW
Vicor Corporation
DC DC CONVERTER 7.5V 100W
SMAJ45A
Yangzhou Yangjie Electronic Technology Co.,Ltd
TVS DIODE 45VWM 72.7VC DO214AC
VLP5610T-220MR45
TDK Corporation
FIXED IND 22UH 450MA 960MOHM SMD
LTC6802IG-1#PBF
Analog Devices Inc.
IC BATT MON LI-ION 1-12CL 44SSOP
SN74LVC1G32DBVR
Texas Instruments
IC GATE OR 1CH 2-INP SOT23-5
XFL3012-102MEC
Coilcraft
POWER INDUCTOR, SHIELDED, 20% TO
SMBJ14CA
Taiwan Semiconductor Corporation
TVS DIODE 14VWM 23.2VC DO214AA
ISL62392CHRTZ
Renesas Electronics America Inc
IC PWR SUPPLY CTRLR 28TQFN
LPC2478FET208,551
NXP USA Inc.
IC MCU 16/32BIT 512KB 208TFBGA
MACH211SP-10JC
Lattice Semiconductor Corporation
IC CPLD 64MC 10NS 44PLCC -

SA305C224KAR
KYOCERA AVX
CAP CER 0.22UF 50V X7R AXIAL
SMF17CA
Diotec Semiconductor
TVS SOD-123FL 17V 200W BI
CC1206KKX7R5BB475
YAGEO
CAP CER 4.7UF 6.3V X7R 1206
MOC3062SM
Fairchild Semiconductor
TRIAC OUTPUT OPTOCOUPLER WITH ZE
AD7224KPZ
Analog Devices Inc.
IC DAC 8BIT V-OUT 20PLCC
74LVC04AT14-13
Diodes Incorporated
IC HEX INVERTER 14TSSOP
MURF1660CT
onsemi
DIODE ARRAY GP 600V 8A TO220FP
CRCW251242R2FKEG
Vishay Dale
RES SMD 42.2 OHM 1% 1W 2512
PE-68025
Pulse Electronics
PULSE XFMR 1:1
MB9AF001PMC-GE1
Infineon Technologies
IC MM MCU
ISOW7841DWER
Texas Instruments
DGTL ISO 5000VRMS 4CH GP 16SOIC
PESD2CAN,215
Nexperia USA Inc.
TVS DIODE 24VWM 41VC TO236AB
BSM150GB60DLCHOSA1
Infineon Technologies
IGBT MOD 600V 180A 595W
TPS2206ADBR
Texas Instruments
IC PWR SWITCH 3:4 30SSOP
AON7400A
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 30V 15A/40A 8DFN
ST1G3236DTR
STMicroelectronics
IC TRANSLTR BIDIRECTIONAL 6DFN
TLC374CPW
Texas Instruments
IC COMPARATOR 4 DIFF 14TSSOP
MCMA260PD1600YB
IXYS
SCR MODULE 1.6KV 260A Y4