Den kompletta guiden till motoriska enheter och mer
En motordrivare är en elektronisk anordning som omvandlar elektrisk energi till mekanisk energi.Därför tillåter motoriska enheter dig att använda el för automatiserat arbete.Om ditt projekt kräver användning av motordrivare kommer att förstå motordrivare att skydda ditt projekt.Den här artikeln hjälper dig att förstå hur motordrivare fungerar, deras funktioner, typer och de grundläggande komponenterna som är involverade i att ansluta dem.
Definition och betydelse av motorförare
Key Characteristik för motorförare
Huvudkomponenter i motoriska enheter
Vanliga typer av motoriska enheter
Arbetsprincip för motorförare
Nödvändigheten av motorförare
Betydelsen av motoriska enheter i applikationer
Applicering av H-Bridge Circuit
Steg för att bygga en motordrivkrets
Sammanfattning
Definition och betydelse av motorförare

Motorförare
En motordrivare, som är riktigt med namnet, är en avancerad enhet utformad för exakt kontroll av en motors operation.Det fungerar som ett viktigt gränssnitt och kopplar motorn till mikrokontrollern.Motorer, särskilt de med hög kraft, efterfrågas spänningar som stiger upp till hundratals volt och betydande strömmar för drift.I kontrastning hanterar mikrokontroller vanligtvis endast låga spänningar, allt från 5 till 12 volt, med strömmar bara hundratals milliamp.En direkt anslutning mellan en motor och en mikrokontroller, frånvarande mellanliggande utrustning, riskerar överbelastning eller skada den senare.
Motordrivare är mer än bara kontakter;De är avgörande för spänning och strömomvandling.De ger mikrokontroller att exakt manipulera motorns hastighet, riktning och vridmoment.Ta till exempel robotarmar eller elektriska fordon;Deras prestationsprecision, en kritisk aspekt, hänger på denna kontroll.
I sin kärna består motorförare av kraftelektroniska komponenter - transistorer och dioder.De samarbetar för att modulera strömmen till motorn.Ofta är dessa komponenter ordnade i en H-Bridge-konfiguration.Denna design gör det möjligt för dubbelriktat strömflöde, vilket gör att motorer kan rotera framåt och bakåt.Kontroll uppnås via en PWM -signal (pulsbreddmodulering).Denna signal, som härstammar från en mikrokontroller, justerar motorvarvtalet genom att ändra puls bredd och därmed kontrollera den genomsnittliga strömmen till motorn.
På marknaden manifesteras främst motorförare som integrerade kretsar (ICS).Dessa IC: er kapslar in alla nödvändiga elektroniska komponenter och har ofta ytterligare funktioner som överströmsskydd, termiskt skydd och spänningsreglering.Dessa skyddsåtgärder säkerställer systemets övergripande stabilitet och säkerhet.Valet av dessa enheter är baserat på motortyp - vare sig det är DC, steg eller servomotorer - och applikationskonteksten, som sträcker sig över industriell automatisering till konsumentelektronik.
Viktiga egenskaper hos motorförare
Att välja en lämplig motordrivare innebär en nyanserad utvärdering av olika viktiga element, vilket kräver en djup förståelse för att sömlöst anpassa sig till de specifika kraven på en given applikation.Den olika karaktären av motortyper kräver specialiserade enheter, vilket gör kompatibilitet till en viktig övervägande.Exempelvis uppvisar den aktuella motoriska motoren (DC Motor) skicklighet vid hantering av stabila strömmar och spänningar, medan stegmotordrivare uppmanar till intrikata övervakning av motorns rotationssteg.I skarp kontrast har servomotordrivna intrikata attribut som kontroll av sluten sling, vilket säkerställer precision i position och hastighetsreglering.
En annan kritisk aspekt är gränssnittets inneboende natur.Många motorförare är noggrant utformade för att sömlöst integreras med kända mikrokontrollskort, såsom Arduino, med standard digitala eller analoga ingångsgränssnitt.Dessa gränssnitt ger mikrokontrollern att styra motoriska operationer genom uttryckliga direktiv.Kör utrustade med trådlösa funktioner, som omfattar Bluetooth- eller Wi-Fi-moduler, dominerar projekt som kräver fjärrkontroll eller integration i smarta hemsystem.Den trådlösa anslutningen underlättar mottagandet av kommandon från smartphone -appar eller fjärrservrar.
Spänning och strömkompatibilitet uppstår som nödvändiga överväganden vid harmonisering av en motorisk enhet med en specifik motor och dess applicering.Enheten måste skickligt hantera motorns maximala ström- och spänningskrav, vilket mildra faran med överbelastning eller suboptimal motorisk prestanda.Dessutom kan applikationer som kräver toppprestanda kräva förare som är utrustade med avancerade krafthanteringsfunktioner, vilket omfattar strömbegränsande, termiskt skydd och spänningsreglering.Dessa funktioner fastställer säkerhet och stabilitet i olika driftsförhållanden.
I praktiska scenarier, utöver dessa grundläggande egenskaper, kan variabler som storlek, effektivitet, kylfunktioner och kostnader utöva inflytande, beroende på projektets omfattning.Dessa noggranna överväganden spelar kollektivt en viktig roll för att på ett klokt sätt välja en motorförare som oklanderligt anpassar sig till de distinkta behoven i ett givet projekt.
Huvudkomponenter i motordriven
Motorn, onekligen hjärtat i motordrivningssystemet, är kritiskt i applikationer som kräver precision, såsom robotik och precisionstillverkningsutrustning.Servomotorer, kända för deras högprecisionskontroll av position, hastighet och acceleration, används vanligtvis inom dessa fält.Däremot gynnas likströmsmotorer (DC -motorer), särskilt borstlösa DC -motorer (BLDC), i applikationer som kräver kontinuerlig rotation, som elverktyg och fläktar.
Kontrollern, som fungerar som systemets hjärna, omfattar vanligtvis en mikrokontroller eller mikroprocessor.Det axlar ansvaret för att tolka insignaler - hastighet, riktning, positionsinstruktioner - och följaktligen genererar kommandon för att styra motorn.I mer sofistikerade inställningar utför specialiserade rörelsekontroller komplexa algoritmer, såsom PID-kontroll (proportionell integral-derivativ kontroll), vilket förbättrar precisionens precision.
Motordrivkretsen spelar en viktig roll i både servomotor och DC -motorsystem och fungerar som en strömförstärkare.Den ökar mikrokontrollerns utgångssignal till en nivå som är tillräckligt potent för att driva motorn.Denna krets, som ofta involverar H-broar, MOSFET: er och transistorer, är skickliga på att hantera högeffektbelastningar och modulera motorisk riktning och hastighet.
Strömförsörjningsenheten, som levererar väsentlig kraft till både motor och styrenhet, påverkar systemets prestanda väsentligt.Dess stabilitet och effektivitet är av största vikt.Valet av strömförsörjning beror till stor del på motortypen och kraftkraven;Till exempel kan servomotorer behöva växlande ström (AC), medan DC -motorer kräver likström (DC).
Anslutningar och gränssnitt säkerställer exakt signalöverföring och effektivt elektriskt energiflöde mellan motorer, styrenheter, drivkretsar och strömförsörjning.Dessutom integreras dessa system ofta med externa enheter som sensorer, skärmar eller fjärrkontrollgränssnitt för förbättrad funktionalitet.
Slutligen kan avancerade motordrivningssystem innehålla ytterligare komponenter som sensorer (position och hastighet), kylsystem (radiatorer eller fläktar) och skyddselement (överströms- och överhettningsskydd).Dessa tillägg höjer avsevärt drivsystemets precision, stabilitet och säkerhet.
Vanliga typer av motoriska enheter

Motor Drive Applications
I den expansiva domänen för motorframdrivning ligger det definierande elementet i de komplicerade kontrollmekanismerna och de speciella motorerna som varje variant tillgodoser.Låt oss fördjupa några anmärkningsvärda avvikelser:
Direct Electric Current Motor (DC Motor) Drives: Skräddarsydd för användning med DC -motorer, omfattande borstlösa DC -motorer (BLDC), dessa framdrivningssystem uppnår grundläggande hastighetskontroll genom spänningsmodulering eller pulsbreddmodulering (PWM).Ett exempel är L293, en allmänt utnyttjad DC -motorförare som är skicklig för att övervaka riktningen och hastigheten för två motorer samtidigt.
Stegmotorförare: Den här föraren utmärker sig i att justera steglängden på en stegmotor, vilket säkerställer noggrann position och hastighetskontroll.Den fungerar genom att rikta växelström mellan motorfaserna och vägleda varje steg i stegmotorn.
Servomotorns enheter: Bekräftas för deras snabba svar i hastighet, position och accelerationskontroll, dessa framdrivningssystem använder ofta ett stängd slingkontrollsystem.De rymmer skickligt variationer i läge och hastighet, vilket möjliggör rörelse med hög precision.Servo -enheter spelar en viktig roll i robotik, automatiserade maskiner och precisionstillverkning.
Specific Integrated Circuit (IC) Drivers: Strömning av integration med mikrokontroller, dessa drivrutiner erbjuder funktioner som överströmsskydd och feldiagnostik.Ett illustrativt exempel är DRV8833, en noggrant utformad IC -drivrutin för att kontrollera små DC- eller stegmotorer.
Högeffektmotorns enheter: Skräddarsydd för att möta de betydande ström- och spänningsfrågor av stora motorer, dessa framdrivningssystem passar applikationer som kräver robust effektuttag, såsom elfordon eller betydande industrimaskiner.De använder flexibla elektroniska komponenter som IGBT: er (isolerade grindbipolära transistorer) och högeffekt MOSFETS.
Programmerbar motordrivare: Till skillnad från de ovannämnda typerna tillhandahåller denna drivrutin ett anpassningsbart gränssnitt för användare att programmera kontrollparametrar.Den tillgodoser specifika kontrollbehov baserat på projektkrav, vilket gör det lämpligt för intrikata applikationer inom automatiseringsteknik och FoU -projekt.
Denna utforskning av motorisk framdrivning visar deras mångfald och specialiserade tillämpningar.Varje typ ger en unik uppsättning kapacitet till bordet och tillgodoser de intrikata behoven hos olika branscher och projekt.
Arbetsprincip för motorförare
motorisk körning
Kärnan i varje motorisk funktion är en mikrokontroller eller mikroprocessor, som fungerar som hjärnorna i tekniken som helhet.Dessa smarta enheter kan producera styrsignaler från programinstruktioner eller användarinmatning inklusive hastighet, riktning och position.I ett automatiseringsscenario, efter att ha mottagit sensordata, genererar styrenheten instruktioner för att leda motorn att använda.
Mikrokontrollerns digitala signaler med låg effekt konverteras i motordrivrutinen till en högeffekt som är skräddarsydd specifikt för motoriskt engagemang.Denna övergång implementeras vanligtvis i mekanismer såsom H-bryggkretsar eller komplexa kraftmosfets.
H-Bridge Circuit är en nyckelkomponent i motordrivna, särskilt DC-motordrivna.Den består av fyra omkopplare (vanligtvis transistorer) i en "H" -formad struktur, som kan ändra motorens strömflödesriktning och därmed kontrollera motorns riktning.Samtidigt utförs moduleringen av dessa switchar via exakt PWM -teknik, vilket möjliggör fin kontroll av motorhastigheten.
Ange pulsbreddmodulering (PWM), en taktisk ledare som styr den genomsnittliga strömmen i en motor genom att smart manipulera kraft i en H-bridkrets.Förutom att helt enkelt justera matningsspänningen, gör PWM att mikrokontrollern kan hantera motorhastighet.
Nära inspektion avslöjar att det finns ingångsstift och styrlogik i motordrivrutinen, med varje stift som har till uppgift att få en annan styrsignal från styrenheten.Dessa stift är ansvariga för att samordna funktioner som motorstart/stopp, riktningskontroll och hastighetsreglering, bli verktygen för enhetens interna logiska kretsar för att tolka signalerna och omvandla dem till noggrant utförda motorstyrningsoperationer.
I världen av komplexa motordrivna system blir sensorer tysta observatörer - mätning, hastighet eller ström - för att granska motorens status.Denna rika data utgör grunden för stängd slingkontroll, vilket säkerställer att motorisk drift följer fördefinierade parametrar.Som ett skyddande åtgärd skyddar en rad säkerhetsfunktioner, inklusive överbelastning, överhettning och spänning av anomali, skyddsmotorer och komplexa kretsar.
Nödvändigheten av motorisk förare

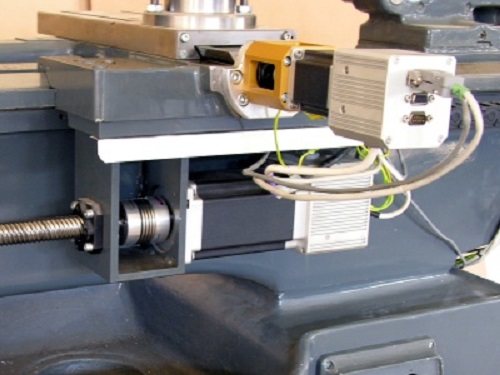
En del av Arduino -projektet
Att införliva en mellanliggande motorförare mellan mikrokontrollern och motorn framträder som ett viktigt företag, främst på grund av den starka kontrasten i deras spänning och nuvarande krav.Mikrokontroller fungerar vanligtvis på diminutiva spänningar (t.ex. 3,3V eller 5V) och strömmar på milliampnivån - en brådskande som kraftigt avviker från motorernas exigences, vilket kan kräva förhöjda spänningar (upp till hundratals volt) och strömmar av större storlek (flera ampere eller mer).
Den direkta anslutningen mellan motorn och mikrokontrollern medför den inneboende risken för överbelastning och potentiell skada.Följaktligen antar motorföraren den avgörande rollen som ett konverteringsmedium, och skickligt omvandlar de lågkraftsignaler som härstammar från mikrokontrollern till de robusta utgångssignalerna som krävs av motorn.
En primär funktion av motorföraren är att förena nedskärningarna i spänningen och strömmen mellan mikrokontroller och motorer.Mikrokontrollern, van vid låga spänningar och strömmar, befinner sig i en stark dikotomi med motorns krav.Motorföraren fungerar som en viktig mellanhand och överför generat mikrokontrollerns lågkraftsignal till den högdrivna utgången som är nödvändig för motorn, vilket minskar de latenta riskerna med överbelastning och skador.
Dessutom har motorförare ett stort inflytande för att förbättra kontrollprecisionen över olika dimensioner som hastighet, riktning och acceleration.Denna precision förutsätter den största betydelsen i applikationer som kräver noggrann rörelsekontroll, inklusive men inte begränsat till robotarmar, automatiserade maskiner och precisionspositioneringssystem.
Ett annat område där motorförare hävdar sin betydelse ligger i att skydda mikrokontroller.Motorer har benägenheten att generera skadliga spänningsspikar eller omvända strömmar under initiering eller upphörande, vilket utgör ett överhängande hot mot mikrokontroller.Motordrivna har ofta skyddskretsar, omfattar isolering, överspänning och överströmsskydd, uppförande av ett formidabelt försvar mot potentiellt skadliga signaler och bevarar mikrokontrollerens integritet.
Energieffektivitet tar centrum, särskilt i motoriska enheter som använder Pulse Width Modulation (PWM) -teknologi.Dessa drivningar harmoniserar kraftförbrukningen av motorer med större effektivitet, vilket inte bara sparar energi utan också minskar risken för motorskada på grund av överhettning.Motordrivrutinerna har en mängd olika gränssnittsfunktioner som förenklar anslutningen till ett brett utbud av mikrokontroller och externa styrsystem.Detta inkluderar sömlös integration med datorer, fjärrkontroller eller andra automatiseringsenheter, vilket visar dess mångsidighet i anpassning till komplexa system.
En annan aspekt som sticker ut är tillhandahållandet av feedback och övervakning i avancerade motoriska enheter.Dessa enheter innehåller vanligtvis sensoråterkopplingsmekanismer för realtidsövervakning av motorisk status, inklusive parametrar som hastighet, position och temperatur.Denna feedback är integrerad i kontrollsystem med sluten slinga och hjälper till att inställas på automatisk inställning och förebyggande fel.
Betydelsen av motoriska enheter i applikationer
Servomotor närbild
Att införliva en motordrivare mellan en mikrokontroller och en motor framträder som en viktig nödvändighet.Detta imperativ uppstår inte bara från den ofta inkongruenta spänningen och nuvarande förutsättningar för de två komponenterna utan också från de mångfacetterade funktionerna som motordrivrutinen antar inom systemet.
Spänning och ström harmoni: Mikrokontroller fungerar vanligtvis vid minskade spänningar, såsom 3,3V eller 5V, med strömmar uppmätta i milliamp.Däremot kan motorer kräva förhöjda spänningar, ibland från tiotals till hundratals volt, och förstärkta strömmar, nå flera förstärkare eller därefter.En direkt koppling mellan en motor och en mikrokontroller utgör en fara överbelastning och nackdel till den senare.Här fungerar motorföraren som en skicklig mellanhand och skickligt överför mikrokontrollerns lågeffektsignaler till robusta signaler som är lämpliga för motorisk drift.
Förbättrad kontrollnoggrannhet: Motordrivare underlättar mer detaljerad kontroll av parametrar som hastighet, riktning och acceleration.Denna detaljerade kontrollförmåga är nödvändig i applikationer som kräver komplex rörelsekontroll (såsom robotarmar, automatiserade maskiner eller precisionspositioneringssystem).
Skydda mikrokontrollern: Motorer har benägenheten att generera skadliga spänningsspikar eller omvända strömmar, särskilt under initierings- eller upphörande faser, vilket utgör ett hot mot mikrokontrollern.Motordrivare innehåller ofta skyddskretsar, omfattar isolering, överspänning och överströmsskydd för att skydda mikrokontrollern från dessa negativa effekter.
Optimering av energiförbrukning: Motordrivningar, särskilt de som utnyttjar PWM (pulsbreddmodulering) -teknik, Excel i styrande motorisk kraftförbrukning.Detta förstärker inte bara energieffektiviteten utan lindrar också faran av motorisk nedsättning på grund av överhettning.
Mångfald i gränssnittet: Motor driver en rad gränssnitt, underlättar anslutningar till olika mikrokontroller och externa styrsystem som datorer, fjärrkontroller eller annan automatiseringsapparat.Denna mångsidighet antar en kardinalroll i sammanslagningen av intrikata system.
Feedback och övervakning: Sofistikerade motoriska enheter kan omfatta feedback från sensor, vilket möjliggör realtidsövervakning av motorns status, omfattar hastighet, position, temperatur och mer.
Sådan återkoppling visar sig nödvändig i kontrollsystem med sluten slinga, främjar automatiska justeringar och bidrar till felförebyggande.
Applicering av H-Bridge Circuit

H-bryggkrets
H-Bridge Circuit, en hörnsten i motorisk kontroll, har omfattande applikationer över olika fält.Dess funktionalitet och applikationsspektrum kan undersökas enligt följande:
Komposition: En typisk H-bro består av fyra växelelement, ofta transistorer, som kan vara MOSFETS eller bipolära typer.Dessa komponenter är strategiskt ordnade för att härma bokstaven "H", med motorn som ansluter vid kretsens centrala segment.
Motorriktningskontroll: H-Bridge förändrar motorns nuvarande riktning genom att variera transistorernas växlingstillstånd.Till exempel inducerar du två transistorer på ena sidan av kretsen medan deaktivering av det motsatta paret inducerar ett specifikt strömflöde och snurrar motorn i en riktning.Omvändning av denna transistorkombination får motorn att rotera motsatt.
Hastighetsjustering: Utöver riktningskontroll reglerar H-bron också motorhastighet, främst via pulsbreddmodulering (PWM).PWM modulerar varaktigheten för strömflödet (tullcykel) vid en hög frekvens, vilket styr motorns genomsnittliga kraft och följaktligen dess hastighet.
Applikationsintervall: H-Bridge Circuit: s exakta kontrollfunktioner gör det lämpligt för olika applikationer.Det används i småskaliga DC-motorer i leksaker och hushållsapparater och i större ansträngningar som elektriska fordon och industriella kontrollsystem.
Integrerade förare: Marknaden erbjuder integrerade H-Bridge-förare, sammanslagningskretsar, kontrolllogik och skyddsfunktioner.Dessa integrerade lösningar förenklar designen, förbättrar tillförlitligheten och innehåller ofta funktioner som överbelastning, termiskt skydd och spänningsstabilisering.
Designutmaningar: Trots dess effektivitet presenterar design med H-Bridges utmaningar.Dessa inkluderar att säkerställa snabb och säker transistorbyte, förhindra skjutning (samtidig ledning som leder till kortslutningar) och hantering av värmen från högfrekvensomkoppling.
Steg för att bygga en motordrivkrets
Att bygga en motordrivkrets kräver noggrann planering och exakt implementering.Låt oss fördjupa sig i trappstegen, med fokus på en krets som använder L293D -motorföraren och Arduino Uno:
Komponentberedning: Börja med att samla in Essentials - en Arduino UNO (eller en kompatibel mikrokontroller), L293D -motordrivrutinen, en eller flera likströmsmotorer, en kraftkälla (som en batteri eller strömadapter), bågtrådar och eventuella ytterligare sensorer eller sensorer ellerHjälpkomponenter.
Förstå L293D: L293D, en allmänt använt motorförare, kan hantera upp till 600 mA och inkluderar överströmsskydd.Den har flera stift för motorstyrning (ingång och utgång), kraft och jordning.
Circuit Diagram Design: Avgörande för processen skapar eller konsulterar ett kretsschema.Denna ritning bör illustrera anslutningarna mellan Arduinos digitala utgångsstift och L293D: s ingångsstift och motor- och strömförsörjningens integration med L293D.
Strömanslutning: Fäst strömkällan till L293D: s kraftstift.Kom ihåg att Arduino UNO: s strömförsörjning kan vara otillräcklig för direkt motorisk drivkraft, vilket kräver en extern strömförsörjning.
ARDUINO-L293D-anslutning: Anställ jumpertrådar för att länka Arduinos digitala utgångsstift till L293D: s ingångsstift.Denna installation möjliggör programmerbar kontroll över motorns riktning och hastighet.
Motoranslutning: Fäst motorns leder till L293D: s utgångsstift.Om du använder flera motorer, se till att korrekt anslutning till varje L293D -kanal.
Arduino -programmering: Utveckla Arduino -kod för motorstyrning.Detta involverar vanligtvis stiftinitiering, ställer in PWM -värdet för hastighetskontroll och hantering av motorrotationsriktning.
Testning och felsökning: Innan du driver kretsen, verifiera noggrant alla anslutningar.Efter uppladdning av koden till Arduino, testa och observera motorns beteende, göra justeringar och optimeringar vid behov.
Säkerhetsåtgärder: Se till att kretsens säkerhet genom att använda en lämpligt rankad kraftkälla, undvika korta risker och integrera säkringar eller nuvarande begränsare vid behov.
Sammanfattning
Kort sagt är motordrivare en integrerad del av moderna elektroniska system och har blivit mycket vanligt eftersom tekniken har utvecklats.Från grundläggande H-bryggkretsar till avancerade integrerade kretsdrivrutiner täcker motorförare design ett brett utbud av tekniknivåer för att passa olika typer av motorer och applikationskrav.Vi hoppas att den här artikeln har varit användbar för dig.Kontakta oss gärna med frågor eller tjänster angående den här artikeln eller någon av våra artiklar.