SPI avmystifierade utforska grunderna i serieperifert gränssnitt
Det seriella perifera gränssnittet (SPI) -protokollet framträder som en hörnsten i området för digital kommunikation, särskilt i inbäddade system som kräver robusta, höghastighetsdatautbyten.Ursprungligen utvecklats för att underlätta sömlöst dataflöde mellan mikrokontroller och perifera enheter, skiljer SPI sig med sina fullduplex, synkrona kapaciteter, vilket säkerställer samtidig dubbelriktad kommunikation.Detta protokoll använder en master-slavarkitektur och använder fyra huvudlinjer-Master Out, Slave In (MOSI);Mästare in, slav ut (miso);Klocka (SCK);och Slave Select (SS) - för att skapa en kontrollerad och effektiv miljö för dataöverföring.Genom att stödja olika operativa lägen och konfigurationer, inklusive 3-trådar och multi-IO-inställningar, anpassar SPI till olika tekniska krav, som ligger till grund för dess omfattande tillämpning i olika sektorer som bilelektronik, industriella kontrollsystem och konsumentelektronik.Denna djupgående utforskning fördjupar de tekniska komplikationerna i SPI och diskuterar dess konfigurationer, transaktionstyper och programmering, tillsammans med dess nyckelroll i moderna elektroniska mönster och system.
Katalog
Bild 1: Serial Perifera Interface (SPI) buss
SPI: s kapacitet och egenskaper
Det seriella perifera gränssnittet (SPI) är nyckeln för snabb, full duplex, synkron dataöverföring mellan en master-enhet och flera slavenheter.Till skillnad från andra protokoll använder SPI fyra huvuddatalinjer: Master Out, Slave In (MOSI), Master In, Slave Out (Miso), Clock (SCK) och Slave Select (SS).Denna installation möjliggör effektiv och robust datahantering för olika applikationer.
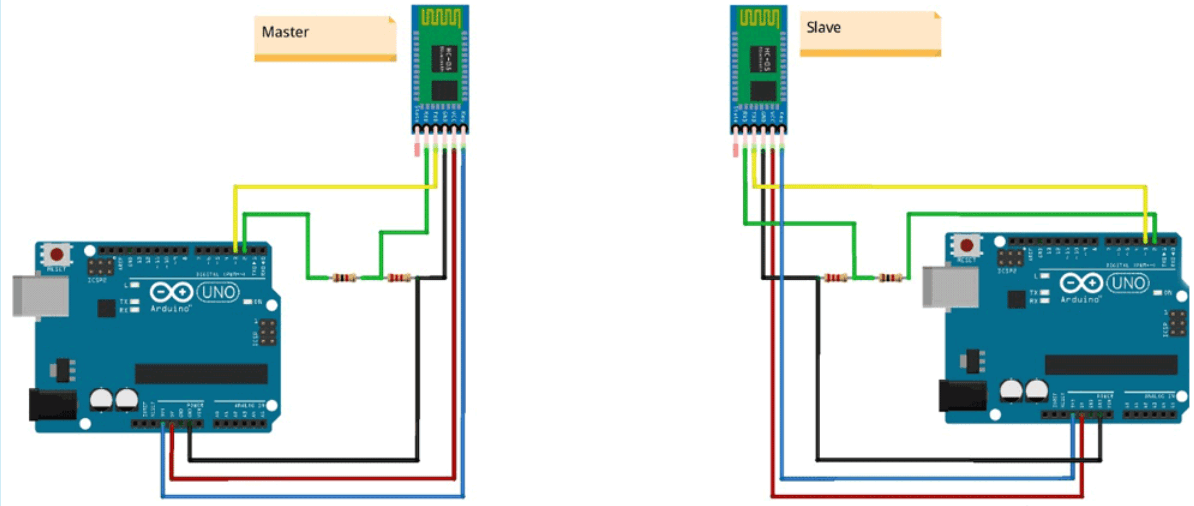
Bild 2: Master-slavkonfiguration
I ett SPI-system flyter data samtidigt i båda riktningarna, vilket möjliggör kommunikation i realtid.Mästaren skickar data till slaven via MOSI -linjen och tar emot data från slaven genom MISO -linjen samtidigt.SPI -enheter kan överföra data som börjar med antingen den mest betydande biten (MSB) eller den minst signifikanta biten (LSB).Detta kräver noggrann konfiguration enligt enhetens datablad för att säkerställa rätt bitsekvens.Till exempel, i Arduino -projekt, krävs efter detaljerade SPI -portkonfigurationsriktlinjer för att matcha de specifika enhetens krav, som beskrivs i tekniska referenser och datablad.
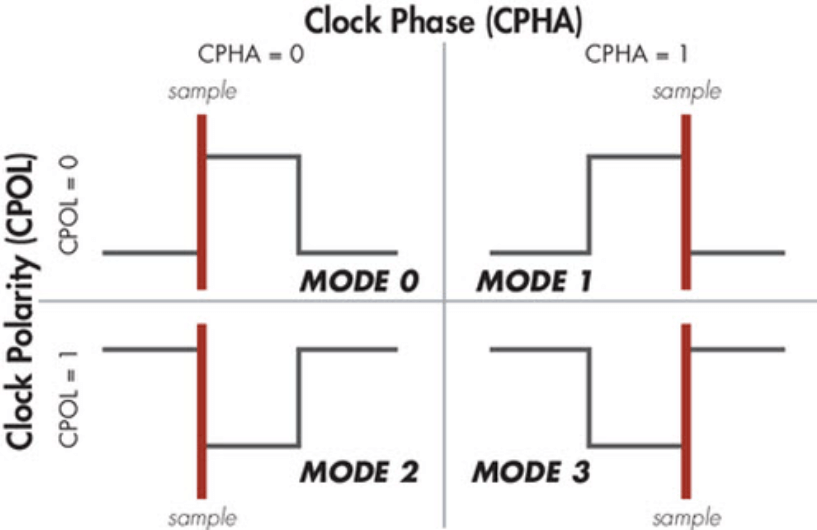
Bild 3: Klockpolaritet och fas
Noggrannheten för dataöverföring i SPI beror på att korrekt ställa in klockpolariteten (CPOL) och fas (CPHA), som bestämmer hur databitar anpassas och fångas under kommunikationen.SPI stöder fyra lägen för att tillgodose olika tidsbehov:
• MODE 0 (CPOL = 0, CPHA = 0)
Klockan är ledig låg.Databitar fångas på klockans stigande kant och överförs på den fallande kanten.Data måste vara redo innan den första stigande klockpulsen.
• Läge 1 (CPOL = 0, CPHA = 1)
Klockan är ledig låg.Databitar fångas på den fallande kanten och överförs vid nästa stigande kant.
• Mode 2 (Cpol = 1, CPHA = 0)
Klockan är ledig hög.Data fångas på den fallande kanten och överförs på den stigande kanten.Data måste vara redo innan den första fallande klockpulsen.
• Mode 3 (Cpol = 1, CPHA = 1)
Klockan är ledig hög.Databitar fångas på den stigande kanten och överförs på den fallande kanten.
Varje läge säkerställer dataintegritet genom att exakt anpassa databitar med klockövergångar, förhindra datakorruption och säkerställa tillförlitliga utbyten mellan master och slavenheter.
Ordlista med nyckeltermer
För att förstå SPI -protokollet krävs det att veta följande nyckeltermer som definierar enhetsinteraktioner:
CLK (serieklocka): Detta är tidssignalen, styrd av masterenheten, som bestämmer när databitar samplas och skiftas under kommunikation.Det ställer in rytmen för dataöverföring över SPI -bussen.
SSN (Slave Select): Denna aktiv-låga kontrollsignal, hanterad av mästaren, väljer den aktiva slavenheten för kommunikation.När denna signal är låg indikerar den att slavenheten är redo att ta emot data från eller skicka data till mästaren.
MOSI (Master Out, Slave In): Denna datakanal skickar information från mästaren till slaven.Data flyter genom denna linje enligt klocksignalerna, vilket säkerställer att bitar överförs i följd från mästaren till en eller flera slavar.
Miso (Master In, Slave Out): Detta är datavägen för att skicka information från slaven tillbaka till mästaren.Det kompletterar MOSI-linjen, vilket möjliggör ett tvåvägs datautbyte inom SPI-ramverket.
CPOL (klockpolaritet): Denna inställning avgör om klocklinjen är hög eller låg när ingen dataöverföring sker.Det påverkar stabiliteten i lediga tillstånd och beredskap för nästa dataöverföring.
CPHA (klockfas): Detta anger när data ska provtagas - antingen på klockkanten i början av cykeln eller kanten som inträffar mitt i cykeln.Det är nyckeln för att anpassa databitar exakt med klockpulser.
Mastering anslutning till slavval och daisy -kedjemetoder
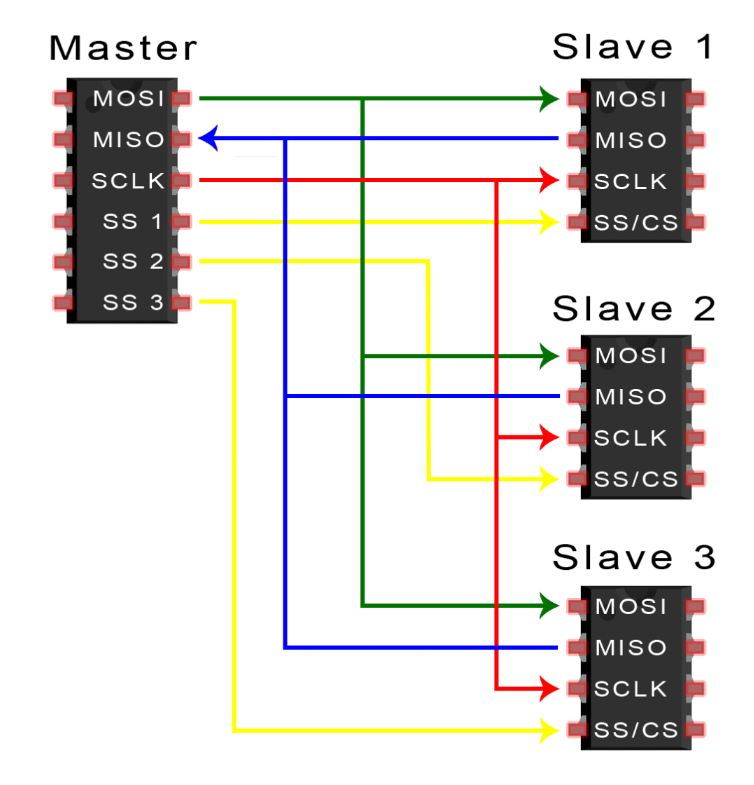
Bild 4: Multipel-slav-select-konfiguration
När en Master SPI -enhet kommunicerar med flera slavar har varje slav sin egen slavval (SS).Denna installation förhindrar datakollisioner och säkerställer att kommandon eller data som skickas av Master endast når den avsedda slaven.Endast en SS -linje bör vara aktiv åt gången för att undvika konflikter på Master In, Slave Out (MISO) -linjen, vilket kan skada data.Om returkommunikation från slavar inte behövs kan befälhavaren aktivera flera SS -linjer för att sända kommandon eller data till flera slavar samtidigt.
För system som behöver fler slavanordningar än de tillgängliga I/O -stiften på master, används I/O -expansion med hjälp av hårdvara som en avkodare eller demultiplexer (t.ex. 74HC (T) 238).Detta gör det möjligt för en enda mästare att hantera många slavar effektivt genom att avkoda några kontrolllinjer i flera SS -linjer.
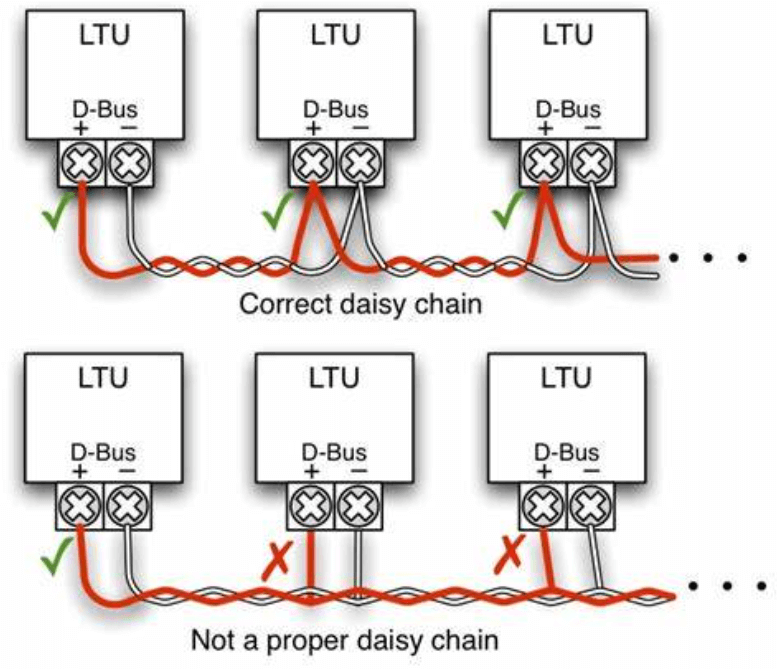
Bild 5: Daisy-Chain-konfiguration
Daisy-Chain-konfiguration
Daisy-Chain-topologin ansluter flera slavenheter i serie med en enda SS-linje.Mästaren skickar data till den första slaven, som bearbetar den och överför den till nästa slav.Detta fortsätter tills den sista slaven, som kan skicka data tillbaka till mästaren via MISO -linjen.Denna konfiguration förenklar ledningar och är användbar i applikationer som sekventiellt kontrollerade LED -matriser, där varje enhet behöver data som passerar genom sina föregångare.
Denna metod kräver exakt tidpunkt och datahantering för att säkerställa att varje slav korrekt tolkar och vidarebefordrar data.SPI -mästaren måste noggrant hantera klockan och dataflödet för att tillgodose förseningar av förökning och installationstider för varje slav i kedjan.
Strategier för effektiv programmering i SPI
Programmering för SPI involverar anslutning av mikrokontroller med inbyggda SPI-kringutrustning för att möjliggöra höghastighetsdataöverföring.För Arduino -användare finns det två huvudsakliga sätt att implementera SPI -kommunikation:
Använda skiftkommandon
Den första metoden använder skiftin () och skift () -kommandon.Dessa mjukvarodrivna kommandon tillåter flexibilitet när du väljer stift och kan användas på alla digitala I/O-stift.Denna mångsidighet är användbar för olika hårdvaruinställningar.Eftersom denna metod förlitar sig på programvara för att hantera bitmanipulation och timing fungerar den emellertid med en lägre hastighet jämfört med hårdvarudriven SPI.
Använder SPI -biblioteket
Den andra metoden är mer effektiv och innebär att använda SPI -biblioteket, som direkt kommer åt Arduino's Onboard SPI -hårdvara.Detta resulterar i mycket snabbare datautbyteskurser.Denna metod begränsar emellertid användningen till specifika SPI-utsedda stift som definieras av mikrokontrollens arkitektur.
Vid programmering av SPI -kommunikation är det betydelsefullt att följa den anslutna enhetens specifikationer från dess datablad.Detta inkluderar att ställa in rätt bitordning (MSB eller LSB först) och exakt konfigurera klockfasen (CPHA) och polaritet (CPOL).SPI -biblioteket i Arduino tillhandahåller funktioner som setBitorder (), setDataMode () och SetClockDivider () för att justera dessa parametrar, vilket säkerställer smidiga och kompatibla interaktioner med olika SPI -enheter.
För Arduino -kort är hantering av Chip Select (CS) -stift ett måste.Äldre brädor, som Arduino UNO, kräver manuell kontroll av denna stift för att starta och avsluta kommunikationssessioner.I skillnad erbjuder nyare modeller som Arduino förfaller automatisk CS -kontroll, vilket gör SPI -verksamheten enklare och mer pålitlig.
Konfigurera SPI-bussen: 3-trådar och multi-IO-inställningar
SPI-protokollet anpassar sig till olika operativa behov genom olika konfigurationer, inklusive standardinställningen för 4-trådar, samt specialiserade format som 3-trådar och multi-IO-lägen.
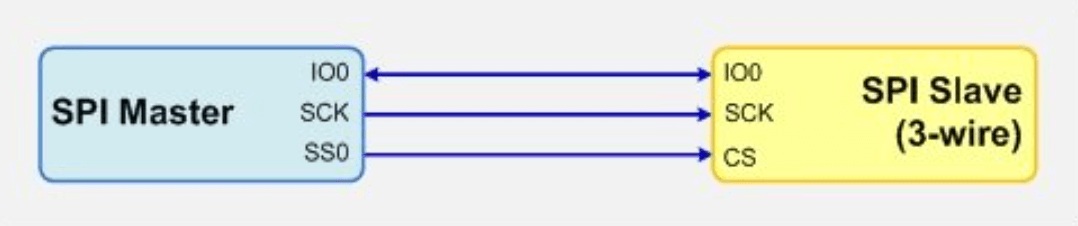
Bild 6: 3-trådkonfiguration
3-trådkonfiguration
3-trådsläget kombinerar Master Out, Slave In (MOSI) och Master in, Slave Out (MISO) linjer till en enda dubbelriktad datalinje.Detta minskar det totala antalet nödvändiga stift till tre: den kombinerade datalinjen, klocklinjen (CLK) och slavvalslinjen (SS).Denna installation kan antingen skicka eller ta emot data vid varje given tidpunkt, men inte båda samtidigt.Även om att minska PIN -räkningen är fördelaktigt för enheter med begränsad GPIO -tillgänglighet, begränsar denna installation också dataöverföring.Det är lämpligt för applikationer där att bevara rymd- och hårdvaruens enkelhet är prioriteringar, och höghastighetsdataöverföring är mindre riskabelt.
Bild 7: Multi-IO-konfigurationer
Multi-Iio-konfigurationer
Multi-Iio-konfigurationer, inklusive dubbla och quad I/O-lägen, utvidgar datalinjerna utöver den enda linjen som ses i traditionell SPI.Dessa lägen använder två eller fyra rader för dataöverföring, vilket möjliggör mycket snabbare datahastigheter genom att möjliggöra samtidig dubbelriktningsdataflöde.Denna kapacitet är särskilt fördelaktig i högpresterande miljöer där hastigheten sätter sig.
ual I/O: Använder två datalinjer, vilket effektivt fördubblar dataöverföringshastigheten jämfört med standardinställningen för en linjelinje.
Quad i/o: Använder fyra datalinjer, vilket avsevärt ökar genomströmningen och effektiviteten.Detta läge är särskilt effektivt för att utföra-på-plats (XIP) -operationer direkt från icke-flyktiga minnesenheter som flashlagring, där data kan överföras på alla fyra rader samtidigt.
Dessa förbättrade I/O -lägen överbryggar gapet mellan traditionella parallella gränssnitt, som vanligtvis kräver fler stift för Jämförbara datahastigheter och mer pin-effektiva seriella inställningar.Genom att öka Antal datalinjer, multi-IO-konfigurationer ökar prestanda medan upprätthålla en balans mellan PIN -räkning och driftseffektivitet, vilket gör dem Lämplig för ett brett utbud av höghastighetsuppgifter.
Utföra en enkel SPI -skrivtransaktion
Att utföra en skrivtransaktion till SPI -flashminnet innebär exakta kommandosekvenser för att säkerställa dataintegritet och effektiv kommunikation mellan master och slavenheten.Operationen börjar med att Master aktiverar slaven Select (SS) -linjen, vilket signalerar Target Slave -enheten för att påbörja en kommunikationssession.Detta steg är kärnan när den förbereder den specifika slavenheten för att ta emot data.
Efter att ha aktiverat SS -linjen skickar mästaren ett skrivkommando tillsammans med nödvändig databyte.Detta kommando anger vanligtvis åtgärden som ska utföras, till exempel "skrivstatusregister", följt av databyten som definierar det nya innehållet i registret.Precision i detta steg är dynamiskt;Alla fel i kommandot eller data kan leda till felaktiga konfigurationer eller datakorruption.Under denna fas förblir MISO-linjen i ett högtimpedansstillstånd för att förhindra att data skickas tillbaka till befälhavaren.Denna inställning förenklar transaktionen och fokuserar enbart på att skicka data till slaven.
När dataöverföringen är klar, inaktiverar Master SS -linjen och markerar slutet på transaktionen.Denna deaktivering berättar för slavenheten att kommunikationssessionen är över, vilket gör att den kan återgå till standby och bearbeta de mottagna uppgifterna.
Hur utför jag en SPI -lästransaktion?
Att utföra en lästransaktion från SPI-flashminnet innebär en steg-för-steg-process för att exakt extrahera data från slavenheten.Denna operation kräver att du skickar en specifik läsinstruktion till slaven, följt av sekventiell datainhämtning.Processen börjar med att Master aktiverar slaven Select (SS) -linjen.Detta isolerar och riktar sig till den specifika slavenheten för kommunikation, vilket säkerställer att kommandon uteslutande riktas till den avsedda slaven.
Steg 1: Skicka läsinstruktionen
När slaven har valts skickar befälhavaren en läsinstruktion.Detta kommando initierar dataöverföringen från slaven till befälhavaren.Precision i detta kommando är nyckeln för att säkerställa att slaven förstår vilka uppgifter som begärs.
Steg 2: Datahämtning
Efter att ha skickat instruktionen börjar slaven överföra den begärda data tillbaka till befälhavaren via Master In, Slave Out (Miso).Denna dataöverföring sker under flera klockcykler, kontrollerade av masterklockan.Befälhavaren läser databyte i följd, vanligtvis involverar ett fördefinierat antal byte baserat på kommandos krav.
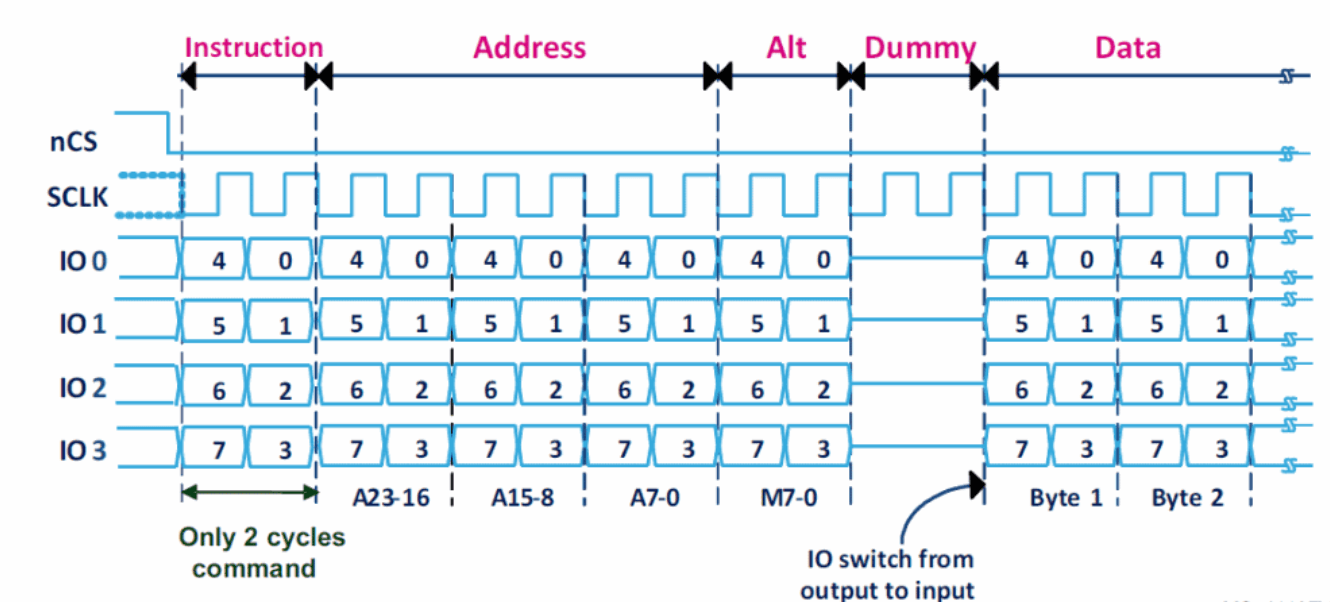
Bild 8: Quad IO SPI -transaktion
Förbättra dataöverföring med Quad IO SPI -transaktioner
Quad IO SPI -läge förbättrar flashminnekommunikation genom att använda fyra dubbelriktade datalinjer.Denna installation ökar avsevärt dataöverföringshastigheter jämfört med enstaka eller dubbla SPI-konfigurationer.
Detaljerad uppdelning av quad IO -läge
Transaktionen startar när huvudenheten skickar ett "snabbt läst" -kommando.Detta kommando är specifikt optimerat för att påskynda läsningsprocessen, som behövs för applikationer som kräver snabb åtkomst till stora mängder data, till exempel i högpresterande datoranvändning och avancerade inbäddade system.
Efter att kommandot skickas överför master en 24-bitars adress.Denna adress pekar på den exakta platsen i flashminnet från vilken data måste läsas.Efter adressen skickas 8 -lägesbitar.Dessa lägesbitar Konfigurera slavenhetens läsparametrar och justera operationen för att tillgodose specifika prestandabehov.
När kommandot och parametrarna är inställda börjar slavenheten överföra data tillbaka till mästaren.Uppgifterna skickas i 4-bitars enheter (nibbles) över de fyra linjerna, vilket effektivt fyrdubblar genomströmningen jämfört med standard-SPI-lägen.
Fördelar med Quad IO -läge
Att använda fyra I/O -linjer i quad IO -läge ökar inte bara dataöverföringshastigheter utan förbättrar också gränssnittets totala effektivitet och prestanda.Denna konfiguration minskar avsevärt den tid som behövs för datatillgång och exekvering, vilket gör den perfekt för avancerade flashminnesoperationer.
Använda SPI -tränare för Quad IO -transaktioner
SPI -träningsverktyget är ovärderligt för att hantera dessa komplexa transaktioner.Det stöder ett robust kommandospråk, vilket möjliggör smidiga övergångar mellan olika operativa lägen-till exempel att byta från en standard 4-tråds inställning till quad IO-läge-inom en enda transaktion.Denna flexibilitet underlättar effektiv testning och felsökning av SPI -konfigurationer, vilket säkerställer att system fullt ut kan utnyttja kapaciteten för Quad IO -teknik.
Översikt över SPI -busstransaktioner
SPI (serieperifert gränssnitt) bussprotokoll, även om det inte är standardiserat i dess dataströmstruktur, använder vanligtvis ett de facto -format som säkerställer kompatibilitet och interoperabilitet mellan enheter från olika tillverkare.Denna flexibilitet gör SPI till ett mångsidigt val för olika applikationer, från enkel sensordatainsamling till komplexa minnes- och kommunikationsuppgifter.
Vanligt transaktionsformat
De flesta SPI -enheter följer ett allmänt mönster i sina datautbytesprocesser, vanligtvis involverar dessa steg:
• Kommandofas
Master -enheten startar transaktionen genom att skicka ett kommando.Detta kommando anger vilken typ av operation som ska utföras, till exempel att läsa från eller skriva till slavenheten.
• Adressfas
För operationer som involverar specifika minnesplatser eller register skickar befälhavaren en adress.Den här adressen berättar slaven exakt var man ska läsa från eller skriva till.
• Datafas
Beroende på kommandot skickas data antingen från mästaren till slaven eller vice versa.I skrivoperationer skickar mästaren data som ska lagras på den angivna platsen i slavenheten.Vid läsoperationer skickar slaven den begärda data tillbaka till befälhavaren.
Applikationens mångsidighet
Sensorintegration: SPI: s förmåga att hantera korta skurar av höghastighetsdata gör det idealiskt för sensorer som behöver snabba datauppdateringar, till exempel de i fordonssäkerhetssystem.
Minnesåtkomst: SPI används ofta i flashminnesoperationer, effektivt hanterar dataöverföring till och från minneschips, särskilt i system där prestanda och hastighet är riskabla.
Kommunikationsmoduler: Enheter som modem och nätverksadaptrar använder SPI för tillförlitlig dataöverföring, vilket utnyttjar dess hastighet och effektivitet för att säkerställa smidig kommunikation.
Utforska fördelarna med SPI: Varför det betyder något?
Det seriella perifera gränssnittet (SPI) -protokollet erbjuder flera viktiga fördelar som gör det till ett föredraget val för en mängd elektroniska applikationer.Dessa inkluderar höghastighetsdataöverföring, enkla hårdvarukrav och effektiv hantering av flera kringutrustning.
|
Fördelar med SPI
|
|
|
Höga dataöverföringsnivåer |
SPI stöder mycket högre dataöverföring priser än standard asynkron seriekommunikation.Denna höghastighet kapacitet krävs för applikationer som behöver snabba datauppdateringar eller Realtidsbehandling, såsom strömmande ljud- och videoenheter, höghastighet datainsamlingssystem och kommunikation mellan mikrokontroller och kringutrustning som sensorer och minnesmoduler.
|
|
Enkel hårdvara |
Att ta emot data via SPI kräver minimal Hårdvara, vanligtvis bara ett enkelt skiftregister.Denna enkelhet minskar Komplexitet och kostnad, vilket gör SPI idealiskt för system med utrymme och budget begränsningar.Skiftregister underlättar direkt dataöverföring till och ut ur Standard digitala register, underlättar integrationen av SPI i befintliga Digitala system. |
|
Effektiv hantering av flera Kringutrustning |
SPI är mycket effektiv i hanteringen Flera perifera enheter.Till skillnad från andra protokoll som behöver komplex buss hantering eller extra signalering för varje enhet, SPI använder Slave Select (SS) rad för att hantera flera enheter.Varje slavenhet på SPI -bussen kan vara individuellt adresserad genom sin egen SS -linje, vilket tillåter enkel expansion att Inkludera fler kringutrustning utan betydande förändringar i kärnan kommunikationsprotokoll. |
|
Mångsidighet över applikationer |
Spis mångsidighet är tydlig i dess utbredd adoption över olika områden.Från inbäddade system i bil- och industriella tillämpningar till konsumentelektronik och Telekommunikation, SPI tillhandahåller en pålitlig och effektiv metod för kortdistanskommunikation mellan en central controller och dess kringutrustning.Dess förmåga att arbeta vid olika klockfrekvenser och Konfigurationer (som varierande antal datalinjer) förbättrar dess ytterligare dess Anpassningsförmåga till specifika projektkrav.
|
Utmaningarna och nackdelarna med att använda SPI
Medan det seriella perifera gränssnittet (SPI) -protokollet erbjuder många fördelar, har det också vissa begränsningar som kan påverka dess lämplighet för specifika applikationer.Med tanke på dessa nackdelar är betydelsefullt för att utforma system och välja rätt kommunikationsprotokoll.
|
Nackdelar med SPI |
|
|
Ökade signallinjekrav |
SPI kräver fler signallinjer än Enklare kommunikationsmetoder som I²C eller UART.En typisk SPI -installation behöver på Minst fyra rader: klocka (CLK), Master Out Slave i (MOSI), Master in Slave Ut (MISO) och Slave Select (SS).Detta behov av flera linjer ökar Kopplingskomplexitet, särskilt i system med många kringutrustning.Detta kan leda till problem med signalintegritet och fysiska layoutbegränsningar.
|
|
Fördefinierat kommunikationsprotokoll |
SPI kräver en väl definierad och Strukturerat kommunikationsprotokoll före implementering.Det stöder inte ad-hoc eller on-the-fly dataöverföring, begränsande flexibilitet i dynamisk System där kommunikationsbehov kan förändras efter utplacering.Varje Transaktion måste uttryckligen initieras och kontrolleras av masterenheten, med fördefinierade kommandon och svar, vilket kan komplicera programvara överhuvud och systemskalbarhet.
|
|
Masterstyrd kommunikation |
I en SPI -installation, huvudenheten Kontrollerar all kommunikation, utan infödda stöd för direkt peer-to-peer Kommunikation mellan slavenheter.Denna centraliserade kontroll kan orsaka ineffektivitet och flaskhalsar, särskilt i komplexa system där flera Enheter måste interagera oberoende utan att involvera befälhavaren.
|
|
Hantering av flera SS -linjer |
Hantering av flera slavval (SS) linjer blir besvärligt när antalet kringutrustning ökar.Varje slavenhet På SPI -bussen kräver en unik SS -linje som kontrolleras av mästaren, Komplicera Master Device's GPIO (General-Purpose Input/Output) Konfiguration och programvara.Hantera dessa linjer effektivt, särskilt När du skalar systemet för att inkludera fler enheter kan öka designen och operationell overhead. |
Tillämpningar av det seriella perifera gränssnittet (SPI) inom teknik
SPI: s flexibilitet och höga dataöverföringshastigheter gör den idealisk för olika applikationer inom branscher, från sensornätverk till bilelektronik.Här är en närmare titt på hur SPI används i olika sektorer:
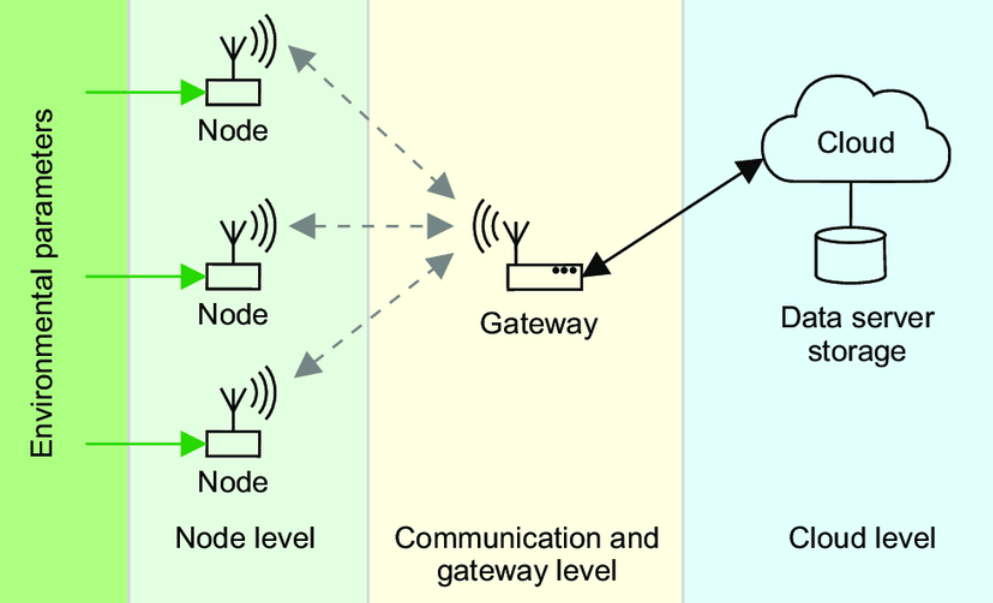
Bild 9: Sensornätverk
SPI sätter sig i sensornätverk, särskilt i datakrävande miljöer som väderstationer.Det möjliggör snabbt och effektivt datautbyte mellan mikrokontroller och sensorer som övervakar temperatur, fuktighet och atmosfärstryck, vilket möjliggör insamling och bearbetning i realtid.

Bild 10: Minnesenheter
I minneslagring används SPI allmänt med flashminneschips och EEPROM.Det stöder höghastighetsdataläsningar och skriver, vilket gör det möjligt för inbäddade system att utföra effektiva datalagringsoperationer, vilket är dynamiskt för applikationer som kräver ofta datauppdateringar eller hämtning.

Bild 11: Visa moduler
Display -teknik som LCD- och OLED -paneler använder SPI för att ta emot data från en mikrokontroller.Detta möjliggör dynamisk uppdatering av visningsinnehållet, som är nödvändigt för enheter som kräver användarinteraktion och visuell feedback, till exempel digitala klockor, MP3 -spelare och smarta wearables.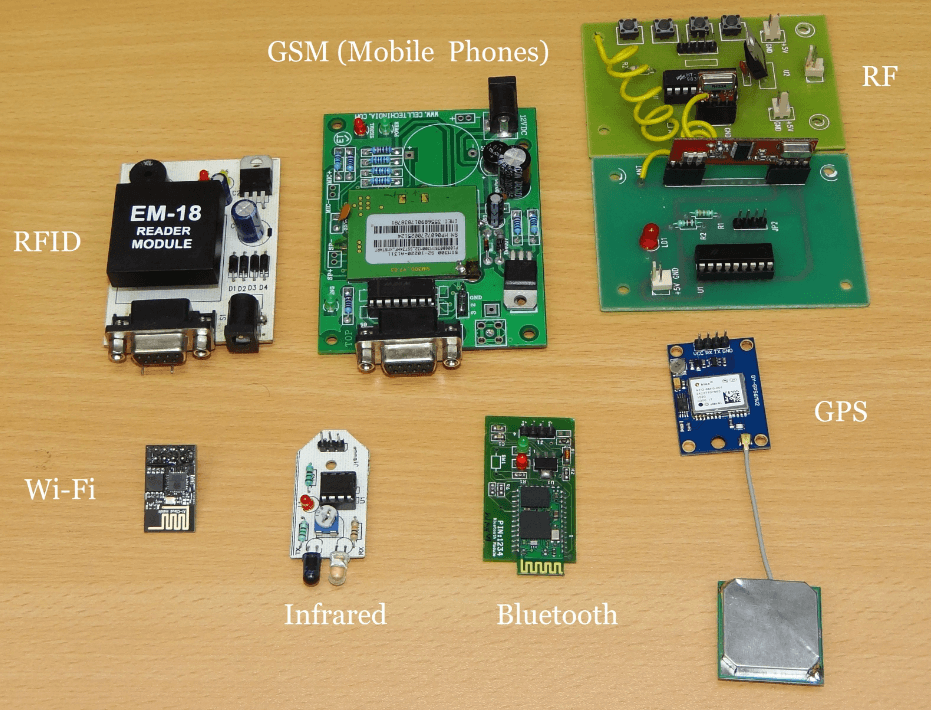
Bild 12: Kommunikationsmoduler
SPI förbättrar kommunikationsmoduler som Wi-Fi, Bluetooth och RF-sändtagare.Det gör det möjligt för dessa enheter att hantera komplexa dataströmmar som krävs för att upprätta och underhålla trådlösa kommunikationslänkar, som är integrerade i moderna sammankopplade enheter.
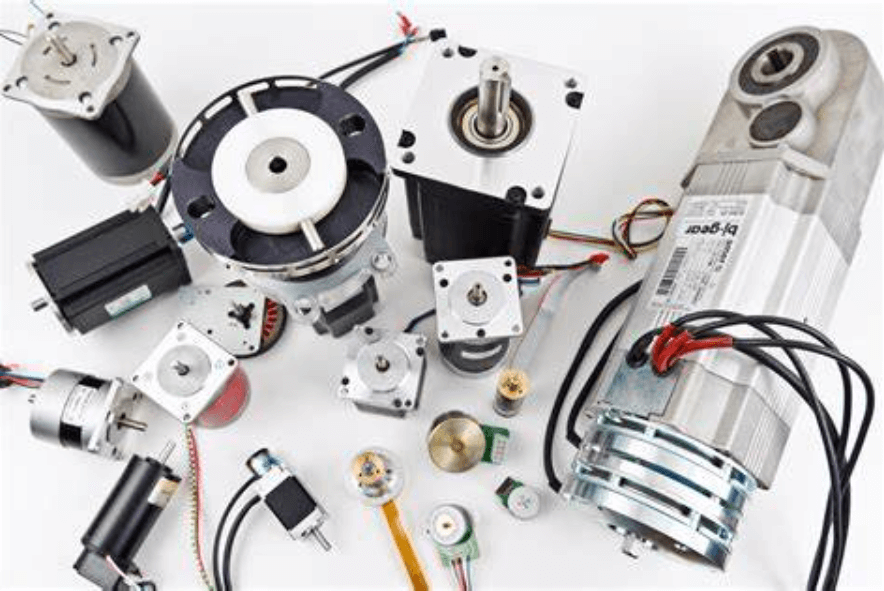
Bild 13: Motorstyrning
I motorstyrningsapplikationer kommunicerar SPI med motoriska drivrutiner för att reglera parametrar som hastighet och riktning.Detta är betydelsefullt inom robotik, industriell automatisering och fordonssystem, där exakt motorstyrning direkt påverkar prestanda och tillförlitlighet.
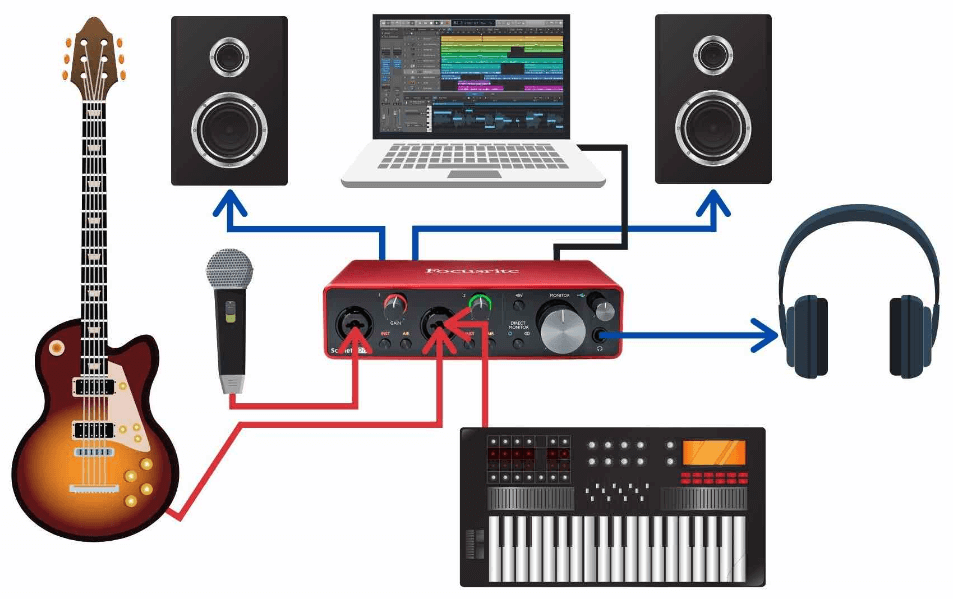
Bild 14: Ljudgränssnitt
För digitala ljudsystem ansluter SPI mikrokontroller till ljudkodek eller digitala till analogkonverterare (DAC), vilket säkerställer sömlös digital ljudöverföring.
Bild 15: Industriella kontrollsystem
SPI stöder industriella kontrollsystem genom att länka programmerbara logikstyrenheter (PLC) med sensorer och ställdon.Detta är dynamiskt för realtidsövervakning och kontroll av industriella processer, vilket förbättrar operativ effektivitet och säkerhet.

Bild 16: Datainsamlingssystem
I datainsamlingssystem gränssnitt med analoga till digitala omvandlare (ADC) och digitala till analogkonverterare (DAC) för exakt signalomvandling.Detta är användbart för applikationer som kräver exakt övervakning och kontroll av fysiska processer genom digitala system.
Bild 17: Automotive Electronics
Inom bilteknologier möjliggör SPI kommunikation mellan mikrokontroller och olika fordonsundersystem, inklusive sensorer, ställdon och elektroniska kontrollenheter (ECUS).Denna integration behövs för att hantera motorfunktioner, diagnostik och infotainment -system, vilket bidrar till modern fordons övergripande säkerhet och funktionalitet.
Bild 18: Inbäddade system
SPI: s enkelhet och effektivitet gör det idealiskt för inbäddade system, där rymd- och krafteffektivitet ofta är begränsningar.Dess förmåga att gränssnitt sömlöst med olika perifera enheter stöder dess utbredda användning i inbäddade applikationer inom flera branscher.
Slutsats
För att uttrycka det kort framträder det seriella perifera gränssnittet (SPI) -protokollet ut som ett nödvändigt verktyg inom elektroniska och datorindustrier, drivna av dess höghastighetsöverföringsfunktioner och flexibla konfigurationsalternativ.Från enkla sensornätverk till komplexa minnes- och kommunikationsuppgifter tillgodoser SPI: s arkitektur till ett brett spektrum av applikationer, vilket gör det till ett föredraget val för designers som söker effektiva, skalbara och pålitliga datakommunikationslösningar.Även om det står inför utmaningar som ökade signallinjekrav och nödvändigheten av exakt masterkontrollerad kommunikation, överväger fördelarna med SPI, inklusive dess enkelhet i hårdvarukrav och förmåga att hantera flera kringutrustning effektivt, avsevärt.När elektroniska enheter fortsätter att utvecklas mot större komplexitet och högre prestandabehov är SPI: s roll beredd att expandera och ytterligare inbäddar sig som en osäker komponent i utvecklingen av innovativa teknologilösningar i olika branscher.De pågående förbättringarna i SPI -konfigurationer, som Quad IO -läget, understryker protokollets anpassningsförmåga och potential att möta framtida tekniska utmaningar, vilket säkerställer dess fortsatta relevans och användbarhet när det gäller att främja digitala kommunikationsramar.
Vanliga frågor [FAQ]
1. Vilka är de fyra lägena för SPI -protokollet?
SPI -protokollet fungerar i fyra lägen, som kännetecknas av deras klockpolaritet (CPOL) och klockfasinställningar (CPHA):
Läge 0 (Cpol = 0, CPHA = 0): Klockan går på låga, och data fångas på klockans stigande kant och förökas på den fallande kanten.
Läge 1 (Cpol = 0, CPHA = 1): Klockan går på låga, men data fångas på den fallande kanten och förökas på den stigande kanten.
Läge 2 (CPOL = 1, CPHA = 0): Klockan går på högt, med data som fångats på den fallande kanten och förökas på den stigande kanten.
Läge 3 (Cpol = 1, CPHA = 1): Klockan går på högt, och data fångas på den stigande kanten och förökas på den fallande kanten.
2. Vad är SPI -gränssnittsformatet?
SPI -gränssnittet består vanligtvis av fyra huvudlinjer:
Master Out Slave In (MOSI): Linjen som används av Master Device för att skicka data till slaven.
Master in Slave Out (Miso): den linje som slaven skickar data tillbaka till mästaren.
Klocka (SCK): Kontrollerad av mästaren synkroniserar denna linje dataöverföring.
Slav Select (SS): Denna linje, driven av mästaren, väljer den aktiva slavanordningen.
3. Vad är skillnaden mellan serie och SPI?
Den primära skillnaden mellan seriekommunikation (som UART) och SPI är i deras konfiguration och komplexitet.Seriell kommunikation använder vanligtvis två ledningar (sända och mottagning) och kräver inte en klocklinje eftersom datasynkronisering är inbäddad i dataströmmen.Däremot är SPI en bussliknande struktur med en separat klocklinje (SCK) och distinkta datalinjer för att skicka och ta emot (MOSI och MISO).Detta gör SPI snabbare men kräver fler linjer och noggrann hantering av slavenheter med SS -linjen.
4. Hur många ledningar används i SPI -kommunikation?
SPI -kommunikation använder fyra ledningar:
Mosi (Master Out Slave i)
Miso (Master in Slave Out)
SCK (serieklocka)
SS (Slave Select)
5. Hur ansluter jag SPI -enheter?
Följ dessa steg för att ansluta SPI -enheter:
Anslut Master's Mosi till varje slaves MOSI.
Anslut mästarens miso till varje slaves miso.
Anslut mästarens SCK till varje slaves SCK.
Varje slaves SS -stift måste vara individuellt ansluten till en unik SS -utgång på mästaren.
Marklinjer bör vara vanliga bland alla enheter för att säkerställa signalintegritet.