L298N Motordrivare: Funktioner, kretsschema och applikationer
Katalog
Introduktion till L298N
L298n är en vertikal paketversion av L298.Det är ett dubbelkanal med fullbryggmotorförare som kan acceptera högspänning och hög ström.Dess arbetsspänning kan nå 46V och dess maximala utgångsström är 4A.Dessutom har L298N också två aktiverade kontrollterminaler.Dessa kontrollterminaler gör det möjligt att justera kretsens arbetsläge genom att anpassa och koppla ur ombordstoppet utan att störas av insignalen.L298N är utrustad med en logisk effektinmatning, vilket gör att den inre logikkretsdelen kan fungera vid lågspänning.Samtidigt kan den också mata ut en logikspänning på 5V externt.För att undvika skador på spänningsstabiliserande chip, när du använder en körspänning högre än 12V, rekommenderas det starkt att använda ett externt 5V -gränssnitt för oberoende strömförsörjning.
L298N styr I/O -ingångsterminalen på huvudkontrollchipet och justerar utgångsspänningen direkt genom strömförsörjningen för att realisera motorns framåt, bakåt och stopp.Normalt kan L298N direkt driva reläer (fyrväg), solenoider, magnetventiler, två likströmsmotorer och en stegmotor (tvåfas eller fyrfas).
Alternativ och ekvivalenter:
• E-L298N
• L298hn
• LM18298T
Funktionella funktioner i L298N
Logikinmatningskompatibilitet: Logikinmatningen för L298N är kompatibel med TTL, CMO och andra logiknivåer.
Överhettningsskydd: L298N har överhettningsskyddsfunktion.När chiptemperaturen är för hög kommer den automatiskt att koppla bort utgången.
Inbyggd fri polaritetsdiod: L298N har en inbyggd fri polaritetsdiod, som kan användas för bromsning av DC-motorer.
Stor strömutgång: L298N kan tillhandahålla stor utgångsström och är lämplig för vissa applikationer som kräver stor körström.
Dubbel H-bridstruktur: L298N integrerar en dubbel H-bridstruktur, som kan styra styrningen och hastigheten för två DC-motorer eller stegmotorer.
L298N kretsschema
Kretsdiagrammet för L298N är som följer:
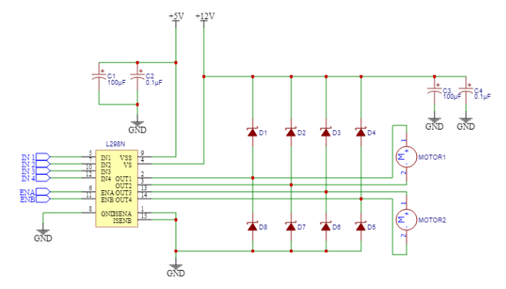
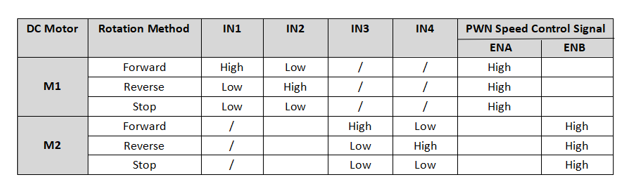
Out1, out2 och out3, out4 är anslutna till motor1, motor2;In1, in2, in3, in4 stift från mikrokontrollern för att komma åt kontrollnivån för att kontrollera motorn framåt och bakåt;ENA, ENB ansluten till kontrollen av aktiveringens terminal, för att styra motorns hastighet.L298N Kontrolllogikförhållanden Diagram är som följer:
När det gäller motorhastighetsregleringen har vi antagit PWM -hastighetsregleringsmetoden.Principen ligger i att förverkliga hastighetsregleringen genom att kontrollera ledningstiden för växlingsröret i en cykel.Den genomsnittliga spänningen U över motorn under en komplett cykel T kan uttryckas som u = vcc × (t/t) = a × vcc.Där, a = t/t, kallas tullcykeln och VCC representerar matningsspänningen.Motorns hastighet är proportionell mot spänningen över motorn, medan spänningen över motorn är proportionell mot kontrollvågformens arbetscykel.Därför finns det ett proportionellt samband mellan motorns hastighet och arbetscykeln: ju högre arbetscykel, desto snabbare hastigheten på motorn.
Kontrollmetod för L298N
När vi använder L298N måste vi inmatningssignaler till IN1, IN2, IN3 och IN4 för att styra motorens framåt och omvänd rotation och hastighet.Här är flera kontrollmetoder:
PWM -kontrollläge
PWM -läge kan effektivt styra motorns hastighet.När vi använder PWM -läge måste vi använda de två stiften EN1 och EN2 för att justera motorns hastighet.Specifikt, när EN1- och EN2 -stiften är på hög nivå, kommer motorn att fungera normalt;När de är på låg nivå kommer motorn att sluta rotera.
Envägskontrollläge
När IN1, IN2, IN3 och IN4 är hög nivå samtidigt roterar motorn framåt;När två ingångsportar är hög nivå och de andra två ingångsportarna är låga nivåer, roterar motorn omvänt.
Dubbelriktat kontrollläge
När du använder det dubbelriktade kontrollläget är IN1 och IN2 ansvariga för att styra motor 1, medan IN3 och IN4 är ansvariga för att styra motor 2. Specifikt, när IN1 är hög nivå och in2 är låg nivå, kommer motor 1 att rotera framåt;Omvänt, när in1 är låg nivå och in2 är hög nivå, kommer motor 1 att rotera omvänt.På samma sätt är kontrolllogiken för IN3 och IN4 också tillämplig på den framåt och omvända rotationskontrollen av motor 2.
PIN -diagram och funktioner i L298N
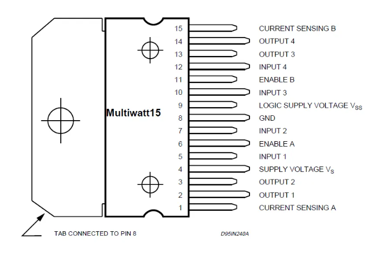
Strömstift
VS: Tillförselspänningsingång (upp till 46V)
GND: Markstift
Logikkontrollnål
IN1, IN2: Används för att styra motorens rotationsriktning 1
IN3, IN4: Används för att styra rotationsriktningen för motor 2
Motorkontrollstift:
Out1, out2: används för att styra motorens riktning 1
OUT3, OUT4: Används för att styra motorns riktning 2
ENA: Aktivera stift, används för att styra hastigheten på motor 1
ENB: Aktivera stift, används för att styra hastigheten på motor 2
Hur använder jag L298N?
Anslut strömförsörjningen: Strömförsörjningen för L298N -drivrutinsmodulen ska hållas i intervallet 12V till 35V.I praktiska tillämpningar kan vi också behöva filtrera strömförsörjningen för att säkerställa kraftförsörjningen för att säkerställa strömförsörjningen.
Anslut motorerna: Vi ansluter de två motorerna till utgångsstiften på L298N genom föraren, och kontrollnivån matas direkt till motorn genom L298N.
Kontroll L298N: Vi använder kontrollporten (Aktivera, kontrollstift) för att kontrollera L298N.Vi måste ställa in statusen för aktiveringsporten och kontrollstiftet när du tilldelar värden.Dessa status kommer att bestämma nivånstatusen för L298N -utgången.Genom att ändra dessa tillstånd kan vi effektivt kontrollera motorns framåt och omvänd rotation och hastighet.
Hur använder jag PWM för att reglera motorns hastighet?
Om vi vill använda PWM för att reglera motorns hastighet har vi två ledningsmetoder:
Ledningsmetod en (rekommenderas):
Vi tar bort jumperlocket mellan kanalaktivering och 5V, ansluter aktiveringsstiftet till PWM -stiftet av Arduino och ansluter stift 1 och 2 till de två normala stiften i Arduino.På detta sätt kan vi styra kanalen på kanalen genom PWM -stiftet för att justera motorns hastighet;Genom att kontrollera nivån för stift 1 och 2 kan vi styra motorns rotationsriktning.Detta sätt att ledningar kräver bara användning av en PWM -stift per kanal, men tar upp två normala stift.Därför måste vi i praktiska applikationer väga och välja mellan flera ledningsmetoder baserat på antalet tillgängliga stift på Arduino.
Ledningsmetod två (rekommenderas inte):
Vi tar inte bort bygeln mellan Channel Enable och 5V, så kanalen kommer att förbli kontinuerligt öppen.Sedan anslöt vi stift 1 och 2 till de två PWM -gränssnitten i Arduino.Genom att kontrollera utgångarna som motsvarar dessa två stift kan vi styra motorrotationsriktningen och hastigheten.Uppenbarligen kommer denna ledningsmetod att uppta fler PWM -stift, eftersom varje kanal kräver två PWM -stift för att kontrollera.Men denna metod upptar inte några vanliga stift.Därför rekommenderar vi inte att du använder detta ledningsschema när PWM -stiftresurser är snäva.
Var används L298N?
Elektriska fordon: L298N kan användas för att styra drivmotorerna i elektriska fordon, såsom elektriska cyklar, skoter, etc. Till exempel i cyklar, genom att exakt kontrollera rotationshastigheten och riktningen för motorn, kan L298N uppnå acceleration, retardation och retardation och retardation och retardationstabil körning av elektriska cyklar.Ryttaren kan överföra instruktioner till L298N genom att använda handtaget eller knapparna och därigenom kontrollera motorns utgång för att göra cykeldrift enligt ryttarens önskemål.
Automatiserad industriell utrustning: Inom industriell automatisering kan L298N användas för att kontrollera motorerna för olika industriutrustning, såsom transportband, robotarmar, industrirobotar, etc. Till exempel i robotarmen kontrollerar L298n noggrant LMotorns rotationsvinkel och hastighet, vilket gör att robotarmen kan röra sig enligt en förutbestämd bana och uppnå högprecision.Detta förbättrar inte bara produktionseffektiviteten, utan minskar också produktionsförluster orsakade av operativa fel.
Robotteknologi: L298N används ofta i robotprojekt för att styra drivmotorn för att förverkliga robotens rörelse och verkan.Industriella robotar behöver ofta utföra tungt, högprecisionsarbete och har extremt höga krav på drivmotorer.L298N ger kraftfullt kraftstöd för industrirobotar med sin utmärkta körförmåga och stabilitet.Oavsett om det är hantering, montering eller inspektion kan L298N säkerställa att industrirobotar slutför uppgifter exakt och effektivt.
SMART HOME: I smarta hemsystem kan L298N användas för att styra motorerna, gardiner, dörrar och annan utrustning för att uppnå automatiserad kontroll.Genom att kombinera med sensorer kan hemutrustning automatiskt justeras efter belysning, temperatur och andra förhållanden.
Solspårningssystem: I solsystem kan L298N användas för att styra lutningsvinkeln på solpaneler för att implementera ett solspårningssystem.Genom kontrollen av L298N kan solspårningssystemet känna till solens positionsförändringar i realtid och justera lutningsvinkeln på solpanelerna i enlighet därmed.Denna dynamiska justeringsprocess säkerställer att solpanelerna alltid upprätthåller den optimala vinkeln mot solen och därmed förbättrar energiuppsamlingens effektivitet för solpanelerna.
Vanliga frågor [FAQ]
1. Kan L298N styrhastighet?
L298N är en dubbel H-Bridge-motorförare som möjliggör hastighet och riktningskontroll av två DC-motorer samtidigt.
2. Varför fungerar inte min L298N?
Det måste vara över 4,5V för korrekt drift av L298.2. Du kommer att förlora kanske 2.5V över L298.Kanske finns det inte tillräckligt med spänning kvar för att köra motorn.
3. Vad är L298N?
L298N Motor Driver är en controller som använder en H-brid för att enkelt styra motorriktningen och PWM för att styra hastigheten.Denna modul låter dig självständigt hantera två motorer på upp till 2A vardera i båda riktningarna.Tillförselområdet kan variera mellan 5V och 35V, tillräckligt för de flesta DC -motorprojekt.
4. Kan vi ansluta 4 motorer till L298N?
Svaret är ja och Nej. Det beror på hur du använder L298N Motor Driver.L298N ursprungligen utformad för att styra två likströmsmotorer eller en stegmotor.Men om du inte vill att varje motor ska rotera bakåt kan du använda varje sida av L298N -drivrutinen för att styra två DC -motorer och totalt 4 motorer.